uData MODBUS sensor porting guide
For English version please refer to https://github.com/alibaba/AliOS-Things/wiki/uData-MODBUS-sensor-porting-guide(eng)
AliOS Things提供MODBUS库,相关API可以查看kernel下面的mbmaster_api.h
mb_status_t mb_rtc_init(mb_handler_t **handler, uint8_t port, uint32_t baud_rate, mb_parity_t parity); //初始化
/* mb_handler_t **handler 入参句柄 */
/* port UART端口 */
/* baud_rate 波特率 */
/* parity 奇偶校验 */
mb_status_t mb_read_holding_reginster(mb_handler_t* req_handler, uint8_t slave_addr, uint16_t start_addr, uint16_t quantity, uint8_t *respond_buf, uint8_t *respond_count);//读取modbus寄存器
/* mb_handler_t **handler 入参句柄 */
/* uint16_t slave_addr 从设备地址 */
/* uint16_t start_addr 寄存器地址 */
/* uint16_t quantity 寄存器数量 */
/* uint8_t *respond_buf 出参数据 */
/* uint8_t *respond_count 出参个数*/
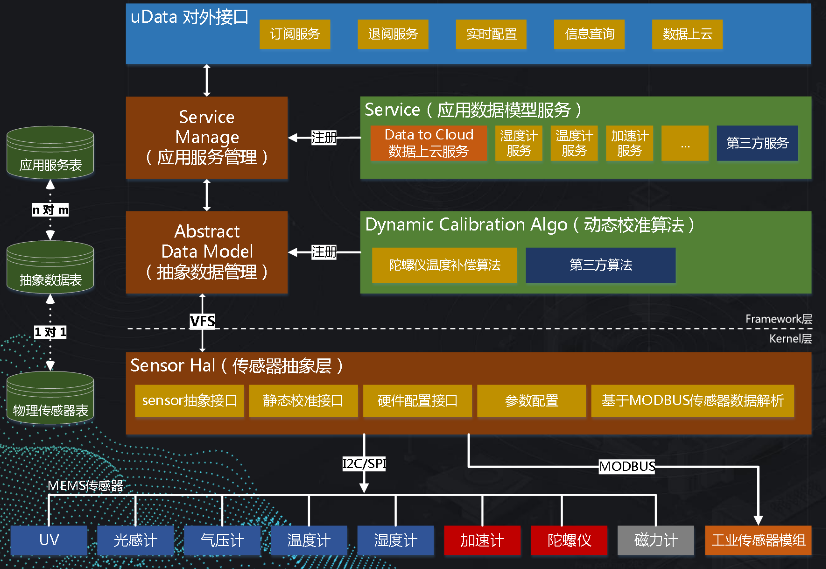
AliOS Things提供一套传感器uData框架,将MODBUS传感器抽象驱动节点,通过vfs接口open,read操作。 MODBUS传感器驱动调用MODBUS库接口读取传感器数据。
MODBUS传感器驱动添加通过类似下面配置表修改 device\sensor\drv\sensor_drv_conf.h
const modbus_sensor_t modbus_sensors[] = {
{ "KunLunHaiAn", "JHFS-W1", "wind speed", dev_windspeed_path, TAG_DEV_WINDSPD,
SENSOR_OPEN, 0X30, 0x002A, 1, 0, 50 },
{ "KunLunHaiAn", "JHFX-W1", "wind direction", dev_winddirection_path, TAG_DEV_WINDDIR,
SENSOR_OPEN, 0X31, 0x002A, 1, 0, 50 },
{ "KunLunHaiAn", "JHYL-W1", "current precipitation", dev_rainfall_path, TAG_DEV_RAIN,
SENSOR_OPEN, 0X32, 0x0002, 1, 0, 50 },
{ "KunLunHaiAn", "JHYL-W1", "today precipitation", dev_todayrainfall_path, TAG_DEV_TODAYRAIN,
SENSOR_OPEN, 0X32, 0x0001, 1, 0, 50 },
};
数组结构体的注释如下:
typedef struct
{
const char * company;//厂商名
const char * model; //型号
const char * name; //名称
const char * path; //设备节点路径
sensor_tag_e tag; //传感器类型
sensor_ability ability; //驱动是否支持,用户自己定义打开还是关闭
unsigned char slave; //从设备地址
unsigned short addr; //寄存器地址
unsigned short reg_cnt;/* 寄存器数量 */
unsigned char byte_reverse; /* 是否数据反转 0: high bytes first, 1: low bytes first */
unsigned short response_time; /* 读数据超时时间slave response time in ms */
} modbus_sensor_t;
-
总线初始化,调用mb_rtc_init,传入句柄handler,UART端口,波特率,奇偶校验等参数。
mb_rtc_init(mb_handler_t **handler, uint8_t port, uint32_t baud_rate, mb_parity_t parity);
-
加载传感器配置参数,配置参数在上面介绍的modbus_sensor_t modbus_sensors这个表中指定,用户也可以自己定义。
-
表中ability打开的传感器创建sensor_obj_t结构体节点,如下所示,可以通过vfs的open,read等接口打开传感器和读取传感器数据。
typedef struct _sensor_obj_t
{
char * path;
sensor_tag_e tag;
dev_io_port_e io_port;
work_mode_e mode;
void * data_buf;
uint32_t data_len;
dev_power_mode_e power;
gpio_dev_t gpio;
dev_sensor_full_info_t info;
uint8_t ref;
int (*open)(void);
int (*close)(void);
int (*read)(void *, size_t);
int (*write)(const void *buf, size_t len);
int (*ioctl)(int cmd, unsigned long arg);
void (*irq_handle)(void);
} sensor_obj_t;
uData框架移植文档参考 https://github.com/alibaba/AliOS-Things/wiki/AliOS-Things-uData-Framework-Porting-Guide
uData框架介绍 https://yq.aliyun.com/articles/368257
uData框架介绍和移植文档可以参考上面链接。
常规mems传感器轮询读取数据时可通过定时器读取,而使用MODBUS传感器时,读取超时时间不可控,这里单独创建了一个task进行轮询读取注册成功的传感器驱动,轮询时间用户可根据自己需求修改。
static void abs_data_polling(void *p)
{
uint8_t i = 0;
uint64_t timestamp = 0;
uint64_t pre_timestamp = 0;
while (1) {
aos_msleep(200);
timestamp = aos_now_ms();
for (i = 0; i < abs_data_cnt; i++) {
if ((timestamp - g_abs_data_db[i]->cur_timestamp) >=
g_abs_data_db[i]->interval) {
abs_sensor_read(g_abs_data_db[i]->tag);
timestamp = aos_now_ms();
pre_timestamp = timestamp;
g_abs_data_db[i]->cur_timestamp = timestamp;
}
}
}
}
- 配置表中列出的目前已经支持的传感器型号,用户修改对应ability控制传感器驱动加载。
- 修改使能的传感器slave,传感器从机地址用户自己配置的,slave和配置一致。
- 按照modbus_sensor_t结构体格式在配置表中添加传感器
- 传感器ability定义开启或关闭,slave和传感器配置的一致。
- 如果传感器类型全新的,在sensor.h文件如下代码格式中定义新path和tag,并添加到配置表中。
#define dev_acc_path "/dev/acc"
#define dev_mag_path "/dev/mag"
#define dev_gyro_path "/dev/gyro"
#define dev_als_path "/dev/als"
#define dev_ps_path "/dev/ps"
#define dev_baro_path "/dev/baro"
#define dev_temp_path "/dev/temp"
#define dev_uv_path "/dev/uv"
#define dev_humi_path "/dev/humi"
#define dev_hall_path "/dev/hall"
#define dev_hr_path "/dev/hr"
#define dev_gps_path "/dev/gps"
#define dev_noise_path "/dev/noise"
#define dev_pm25_path "/dev/pm25" // pm2.5
#define dev_co2_path "/dev/co2"
#define dev_hcho_path "/dev/hcho"
#define dev_tvoc_path "/dev/tvoc"
#define dev_pm10_path "/dev/pm10" // pm10
#define dev_pm1_path "/dev/pm1" // pm1.0
#define dev_ph_path "/dev/ph"
#define dev_vwc_path "/dev/vwc"
#define dev_ec_path "/dev/ec" //electric conductivity
#define dev_salinity_path "/dev/salinity" //salinity
#define dev_tds_path "/dev/tds" //Total dissolved solids
#define dev_windspeed_path "/dev/windspeed"
#define dev_winddirection_path "/dev/winddirection"
#define dev_rainfall_path "/dev/rainfall"
/* add the new sensor type into the last position */
typedef enum
{
TAG_DEV_ACC = 0, /* Accelerometer */
TAG_DEV_MAG, /* Magnetometer */
TAG_DEV_GYRO,/* Gyroscope */
TAG_DEV_ALS, /* Ambient light sensor */
TAG_DEV_PS, /* Proximity */
TAG_DEV_BARO,/* Barometer */
TAG_DEV_TEMP,/* Temperature */
TAG_DEV_UV, /* Ultraviolet */
TAG_DEV_HUMI,/* Humidity */
TAG_DEV_NOISE, /* NoiseLoudness */
TAG_DEV_PM25,/* PM2.5 */
TAG_DEV_PM1P0, /* PM1.0 */
TAG_DEV_PM10,/* PM10 */
TAG_DEV_CO2, /* CO2 Level */
TAG_DEV_HCHO,/* HCHO Level */
TAG_DEV_TVOC,/* TVOC Level */
TAG_DEV_PH, /* PH value */
TAG_DEV_VWC,/*volumetric water content*/
TAG_DEV_EC, /* EC value */
TAG_DEV_SALINITY, /* SALINITY value */
TAG_DEV_TDS,/* Total dissolved solids */
TAG_DEV_WINDSPD,/* Total dissolved solids */
TAG_DEV_WINDDIR,/* Total dissolved solids */
TAG_DEV_RAIN,/* Total dissolved solids */
TAG_DEV_HALL,/* HALL */
TAG_DEV_HR, /* Heart Rate */
TAG_DEV_RGB,/* RGB sensor */
TAG_DEV_GS, /* Gesture sensor */
TAG_DEV_IR, /* IR sensor */
TAG_DEV_GPS,
TAG_DEV_SENSOR_NUM_MAX,
} sensor_tag_e;
在uData.mk中打开相关服务的宏,如下所示,在static int udata_std_service_init(udata_type_e type)函数中会注册相关的服务。
GLOBAL_DEFINES += AOS_UDATA_SERVICE_ALS
GLOBAL_DEFINES += AOS_UDATA_SERVICE_PS
GLOBAL_DEFINES += AOS_UDATA_SERVICE_BARO
GLOBAL_DEFINES += AOS_UDATA_SERVICE_TEMP
GLOBAL_DEFINES += AOS_UDATA_SERVICE_UV
GLOBAL_DEFINES += AOS_UDATA_SERVICE_HUMI
GLOBAL_DEFINES += AOS_UDATA_SERVICE_NOISE
GLOBAL_DEFINES += AOS_UDATA_SERVICE_PM25
GLOBAL_DEFINES += AOS_UDATA_SERVICE_CO2
GLOBAL_DEFINES += AOS_UDATA_SERVICE_HCHO
GLOBAL_DEFINES += AOS_UDATA_SERVICE_TVOC
用户在自己APP订阅需要传感器数据,如下所示。
ret = uData_subscribe(UDATA_SERVICE_TEMP);
if (ret != 0) {
LOG("%s %s %s %d\n", uDATA_STR, __func__, ERROR_LINE, __LINE__);
}
ret = uData_subscribe(UDATA_SERVICE_HUMI);
if (ret != 0) {
LOG("%s %s %s %d\n", uDATA_STR, __func__, ERROR_LINE, __LINE__);
}
注册回调函数int uData_register_msg_handler(void *func); 在回调函数中会传入传感器数据。
编译时需要打开MODBUS宏,增加编译参数modbus_sensor_enable=1,以uDataapp为例
aos make uDataapp@developerkit modbus_sensor_enable=1
