Mesas 041 supporting materials
In this page, we provide additional information about the experiments in Mesas 041. Datasets documenting the following experiments are available at Google drive.
The first platform used in the experiments is the tracked robot CAMELEON ECA, which is a 0.7x0.6 m vehicle with a payload over 25 kg. The platform has two main independently controllable tracks and two auxiliary flippers for movement in difficult terrain. It is also equipped with two cameras, one in the front and one in the back of the body of the robot. As these cameras are located too low over the ground, they are not suitable for visual navigation in grassy terrains. Thus, we installed eCon's TARA stereocam, and we use the images from its left camera. This camera is attached to the robot superstructure, which also contains a stand for the control laptop and for the Fenix 4000 lumen torch used for night experiments.
To demonstrate the system's ability to work indoors on a small robot, we deployed it on the MMP-5 platform, which is made by TheMachineLab. It is a small robot with dimensions 0.3x0.3 m, payload over 3kg and four-wheel differential drive along with a control unit, which can control each wheel independently via a simple serial protocol. We equipped this robot a low-resolution USB camera and a computer based on an AT3IONT-I miniATX board with Intel Atom 330 CPU.
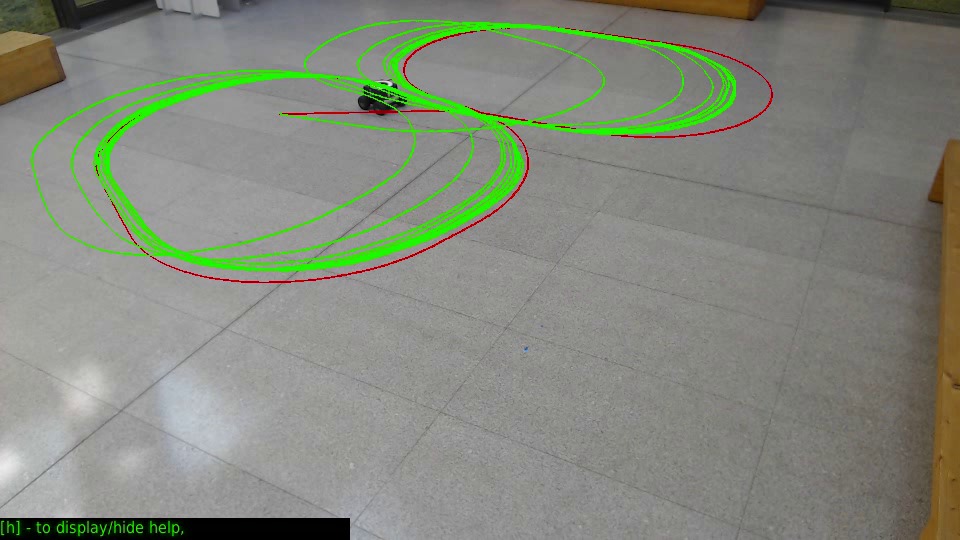 Click for video of the second indoor experiment - taught path in red, autonomously traversed path in green.
Click for video of the second indoor experiment - taught path in red, autonomously traversed path in green.
The John Deere X300R is a small tractor with gasoline 13.8 kW motor and automatic K46 hydrostatic transmission. It weights around 300 kg, its wheelbase is 1.25 m and overall dimensions are 2.5x1.0x1.1 m. This machine, which has a car-like drive, was modified and equipped with hydraulic steering and linear motor with position feedback for pedal control. Due to the mechanical configuration of the control system, both steering and velocity can be controlled only coarsely and with a significant time delay. The tractor is also equipped with a set of sensors to support autonomy: 4 emergency stop buttons, active front bumper, rotary encoders, Hall sensor for measuring steering angle, set of indicators and switches (including manual/automatic digital input), 2D Lidar SICK LMS100 and a AV3135 Dual Sensor H.264 Day/Night camera. The low level electronic components (pedal position, encoders, steering, I/O) are controlled via CAN bus modules, connected to an APU2 computer.

We tested the system on a large, 6x6 drive unmanned ground vehicle called `TAROS', developed by the VOP company. The primary purpose of TAROS is a direct support of mechanised, reconnaissance and special forces in their operations. Currently, the TAROS platform offers long-range teleoperation, GPS-based waypoint navigation and autonomous people following. However, its sensory suite, consisting of a Velodyne 3d lidar, three 2d SICK lidars and pan-tilt cameras, is sufficient for fully autonomous operation in adverse terrain. One of the main features of TAROS is its modularity. Its core module, which contains all systems required for autonomous operation, is propelled by four electrically-driven wheels with independent suspensions. The wheels are equipped with odometric sensors and can be steered and driven individually. Each TAROS extension module adds two individually steered wheels, which allows to configure TAROS as 6x6 or 8x8 wheel drive UGV. For our experiments, we used the TAROS in 6x6 configuration with a hybrid power extension module. The TAROS control system offers a convenient serial protocol which allows an ordinary PC to retrieve low-level (such as individual wheel angles) as well as high-level (such as distance of the closest obstacle) information. Furthermore, the protocol enables low-level control of individual wheel actuators as well as high-level driving modes, which allow to control the angular and forward speed in four different wheel configurations. The chosen protocol allowed a quick implementation of a basic ROS driver for the TAROS platform. The driver retrieves odometric information from the TAROS middle wheels and utilises a driving mode, which controls the TAROS heading by steering the forward and rear wheels while keeping the middle wheels straight.
 Click for video of the Taros experiment.
Click for video of the Taros experiment.
Thorvald is a platform intended for various agricultural scenarios. This platform can be equipped with several different modules, which extends the variety. It has four wheels, which can be steered and actuated individually and the width between the wheels can be changed depending on the desired agricultural application. We have used the standard wheel configuration with the width of the wheel base of 1.5 m. All the wheels are equipped with suspension modules, which allows the platform to drive in rough terrain.
