IROS Navigation without localisation: reliable teach and repeat based on the convergence theorem supporting materials
The software version used for the experiments in paper is from the 30th April 2017 (commit 0f2a2009ee309af6b008523d7d4d7265808efc60)
In this page, we provide additional information about the experiments in IROS - Navigation without localisation: reliable teach and repeat based on the convergence theorem. Datasets documenting the following experiments are available at Google drive.
To evaluate that the system can correct position errors, we have taught the CAMELEON platform a closed path at the yard of the Charles Square CTU campus.

To demonstrate the interplay between the path profile and vision-based correction, we let the robot autonomously drive using vision and local maps only, then using only odometric info, and both of these combinations. When using only vision or only odometry, the robot diverged from the taught path. Since we hypothesised that the combination of odometric information and vision can suppress position errors, we put the robot ~1.5m away from the taught path and let it traverse the path repeatedly. The results are reported in the paper.
The indoor experiments compare the real system behaviour with the mathematical model of its position error. We used the MMP-5 robot platform equipped with a circular marker, which allows tracking of the robot position. The platform has no odometric system and is equipped with a low resolution, uncalibrated camera. In the first trial, we guided the robot along an oval-shaped path. Then, we displaced the robot 1~m away from the path start and let it autonomously drive several times while recording its position with the circular marker. Videos 1 and 2 show the robot trajectory, view from the robot and matched features.
 Click for a video of the external and onboard view of the first indoor experiment setup - mapping in red and first three repeats in green.
Click for a video of the external and onboard view of the first indoor experiment setup - mapping in red and first three repeats in green.
The error evolution confirms the mathematical model presented in the paper. On the straight segments, the position error stabilises and it diminishes again when the robot traverses the semi-circular path segments.
In the second indoor trial, we guided the robot along an eight-shaped path, and let it traverse the path several times as well. Figure 3 demonstrates the convergence of the robot traversed path (green) to the path taught (red).
This trial was performed in a larger hall which means that the average distance of landmarks is bigger. The difference in distance causes slower convergence of the robot trajectory. Furthermore, the start and end of the taught path are not the same, therefore the robot starts with an error during subsequent path traversals. The Figure 3 shows that the first part of the repeated path is slightly displaced from the taught one.
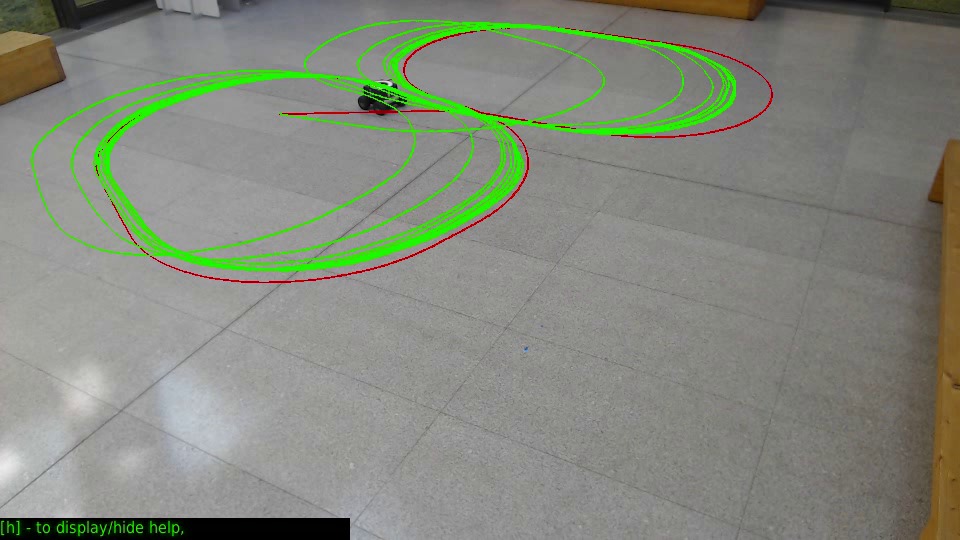 Click for video of the second indoor experiment - taught path in red, autonomously traversed path in green.
Click for video of the second indoor experiment - taught path in red, autonomously traversed path in green.
This experiments demonstrated the ability of the system to deal with uneven terrain and variable illumination. For these, we use the CAMELEON platform. There are three trials in this experiment that have the same path at Hostibejk hill near Prague, but they differ in the daytime when they were performed. The first set of trials was performed during the day, the second during evening and the third at nights. For the first trial, we created the map in a clear sky weather and let the robot autonomously drive one month later during a cloudy day. In the second trial, we attached a 4000-lumen searchlight to the robot and let it illuminate the scene by itself.
 Click for video: One of the night outdoor experimental trials.
Click for video: One of the night outdoor experimental trials.
In these trials, we displaced the robot by 1.5m and let it traverse the path 7 times. The robotic platform with imperfect odometry, and equipped with an uncalibrated camera working in low-visibility conditions reliably traversed over 1.2 km, reducing the initial position error to ∼0.2–0.3 m - see the paper for details.