Based on Mitch Galgs instructions on how to build a Linux kernel for qemu. This awesome guy also updated his buildinstructions so expect some updates on my attempt if he updates too.
http://mgalgs.github.io/2015/05/16/how-to-build-a-custom-linux-kernel-for-qemu-2015-edition.html
- The kernel currently is: 8.8Mb
- The initramfs without other programs but busybox: 694K
- Added musl will grow the initramfs: 78Mb With carefull manipulation, the kernel can be made smaller, so does initramfs
My goals in non particular order are:
- Run Linux on any/most CPU (that qemu offers, and that intrests me ;) ).
- Crosscompile Linux (probably x86_64 as a base).
- Partial functional
- Have Firewire terminal on PowerPC. (this is part of another project)
- Have small amount of scripts that can build and partialy test various goals
- get a update system working
- smaller compiler for inside (TCC, work has started in a branch)
Most of my research and/or playing is done on a x86_64 Arch Linux system, I asume the reader is skilled enough to translate any commands or hints to their own system or reading other resources to accomplish their own goals. This is never ment for production or replacing LFS for example.
I do not recommend this documentation or scripts as a teaching tool or seen as fact. this is just me playing arround. You can however learn from it, or teach how not to do things. user root, password root
Updated to the latest I know Kernel and applications
| Package | Version | Date |
|---|---|---|
| Linux kernel | 6.8.7 | 2024-04-17 |
| BusyBox | 1.36.1 | 2023-05-19 |
| Drobbear | 2024.84 | 2024-04-04 |
 Latest TeenyLinux with (optional) Musl and networking turned on (slower startup due to 270mb extra musl compiler)
Latest TeenyLinux with (optional) Musl and networking turned on (slower startup due to 270mb extra musl compiler)
- fixed undocumented make iso script, added documentation
- Added time function, to measure compile time (no qemu)
- Made ((d)a)sh now default, including the profile, so no bash_profile/rc
- Since 5.18, Symbol CONFIG_WERROR is causing me trouble, added "fix" in config
- Added a ReqCheck.sh to check for basic program requirements and permisions.
- extracted the user variables to vars.sh, nomore main build.sh updates too often
- beta tools script, based on LFS.
Powerpc still fails, no other arch beside x86_64 work. see crosstools.sh for a ARM attempt, currently boots the kernel, and no busybox or temp init. Dropbear has been added as a extra one could compile. everything inside the build directory gets included network has been changed to reflect my current tap/bridge layout.
The build script knows the following commands passable as arguments:
./build.sh -d
./build.sh -delete
./build.sh -deletealldeletes all but the tarbal files (handy to restart building without downloading the tarbals
./build.sh -arch [ppc|x86_64]
./build.sh -cpu [ppc|x86_64]builds for the selected arch, x86_64 is default tho, x86 isnt tested(yet)
./build.sh -init
./build.sh -makeInit
./build.sh -makeinitBuilds or rebuilds only the initramfs and then tries to run qemu, handy when trying new init programs or other initramfs tests
./build.sh -k <kernel version>
./build.sh-kernelBuild and start a instance with a mac adress of choice
./build.sh -net <macaddr>for example
./build.sh -net 52:55:00:d1:55:01Will run a VM with that specific macaddr (you need to change the ip inside or do DHCP trickery).
Ive added a user called root inside the passwd file, to login, use password root to build without login prompt:
./build.sh -nlor
./build.sh -nologinthis is like the old behavior.
./build.sh -t
or
./build.sh -timeThe above function has been added to measure the compilation time for the whole project and seperate parts. already figured out the kernel compiles faster?!? by cleaning the sources. Busybox can use a precompiled sourcetree just fine. overall not much different. There will be no qemu running at the end. this oprion might change in the future.
before any module can be compiled, a first run without support has to be done, or atleast the linux kernel source folder should be compiled. The sample module is a git submodule, and you should init this if you havent already by:
git submodule init
git submodule update
for more submodule details, check: Cloning a Project with Submodules
Then first do a dry run build without modules:
./build
After building the kernel, termination of the qemu instance is posible, a simple test to see there are no mods also posible Right after compilation, go into the modules folder, delete the old initramfs and compile a new module. after completion, rebuild initramfs and test the installed module:
cd module
make clean
make
cd ..
./build -modalternativly this can also be used to make a new init, for instance to add other tools from the build dir.
./build -modulefeel free to do this diferently when requirements change currently loads a test module and supports
modprobe [module name]
lsmod
modprobe -r [module name]check buildscipt where to place module or change code to load yours. default script copies the hello.ko to /lib/module/[arch]/
run the buildscript :D
select arch support comming this feature is being worked on. I want 1 scritp to do all, altho I might consider building the crosstools externaly. so you might need to run that first.
A temporarely ARM target inside crosstools is in the work. requires arm-none-eabi- set of build tools as well as a fake init static compiled
For new programs to be added, there are multiple ways to do so. The easiest I think is to either manualy or using a script to build and copy the required files into the to be made initramfs.
Everything inside the $TOP/bin/build/ will be copied over to the new initramfs.
Dropbear is an example build script that will build dropbear (an SSH server/client) staticly compiled.
In case of dropbear, if the right keys are in place, starting with network support:
./build.sh -net 52:55:00:d1:55:01then inside the system:
dropbear -RYou should now be able to ssh into this (maybe remove the old known host ip and key from your hosts .ssh/known_hosts)
ssh root@192.168.66.6tip add the following to prevent a bloating knownhosts file.
-o "UserKnownHostsFile /dev/null"Based on Dropbear, Musl precompiled installer script has been added. More information and the tarfile can be found here: https://musl.cc/ Run to install:
./musl.shDont forget to rebuild init, with for example
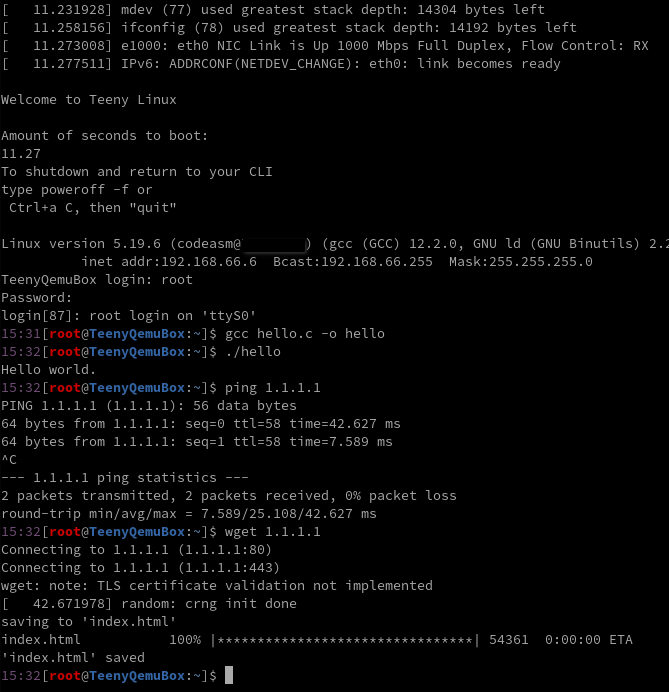
./build.sh -initNow compilation using gcc inside the envirement should be posible. the included C source should compile succesfully to hello and display hello world using:
g++ -o hello hello.cpp
./helloUninstalling, or actualy deleting. It will delete the complete /build/ contents, rerun other tools if needed to keep:
./musl.sh -dFor a while it was possible to generate an bootable iso, it should now work with the latest kernel. After succesfull building of teenylinux, one can run:
mkiso.shthis will produce a boot.iso in the ../obj/ folder ($TOP). and try to boot it in qemu aswell. The mkiso file will check if mkrescue and xorriso are installed on your system, reqcheck will not check for this.
If you want Musl and or dropbear to be included or any other tool in the iniramfs, please add them to the build folder as described in chapter Adding new programs . the ../bin/iso/ folder isnt removed, one could add files there aswell to be included with the iso file (grub modules maybe?). checking mkiso.sh and making appropiate modifications is probably best.
To get basic network working, the current buildscipt and setup of qemu will use basic networking. The IP will be 10.0.2.15 and you can reach the internet if your host and qemu allows other virtual machines aswell.
To use a bridge setup (wich I wanted to try anyway) and be able to ping another virtual machine do the following: Create a bridge and 2 taps (1 tap for a virual machine, either eth0/or wireless for internet, or another tap for another virtual machine). As root (or use sudo)
ip tuntap add tap0 mode tap
ip tuntap add tap1 mode tapCreate the actual bridge
brctl addbr br0Add the two taps to the bridge
brctl addif br0 tap0
brctl addif br0 tap1Bring the interfaces up, so they actualy work.
ifconfig tap0 up
ifconfig tap1 up
ifconfig br0 upthen add a network device to your qemu instance, if using my buildscript, run the following
./build -net 52:55:00:d1:55:01The system should get an IP from your dhcp server (you can also add one using dnsmasq)
sometimes you need to change the ip of an instance, then inside one of the qemu instances, change to static ip for example:
ifconfig eth0 down
ifconfig eth0 up 10.0.2.16 netmask 255.255.255.0 upAnd now you should be able to ping eachother and do stuff. If you setup a DHCP server or add the bridge to a network with a DHCP server, you can set the instances to recieve a IP from the said DHCP server, which in the current version is the case.
To ssh into your freshly build TeenyLinux, you simply type:
$ ssh root@192.168.66.6 -o "UserKnownHostsFile=/dev/null"The added -o option redirects the known host key to /dev/null, because each rerun of dropbear generates a new hostkey. These steps are not nececairy when reusing the hostkey (by supplying it during the init build fase etc.)
To remove interfaces and shutdown stuff delete a tap (also for tap1 or eth0) and deteling the tap
brctl delif br0 tap0
tunctl -d tap0Bring the bridge down and remove it:
ifconfig br0 down
brctl delbr br0Now you can up your eth0 or wirelless again for internets or use a VM without these bridges and use usermode networking.
To flush the ip and be able to add eth0 of your host to the bridge:
ip addr flush dev eth0Checking out if the bridge has the right and all taps or interfaces you wanted:
brctl showMore details and tips can be found at:
- https://gist.github.com/extremecoders-re/e8fd8a67a515fee0c873dcafc81d811c
- https://wiki.qemu.org/Documentation/Networking#Tap
- https://wiki.archlinux.org/index.php/Network_bridge#With_bridge-utils
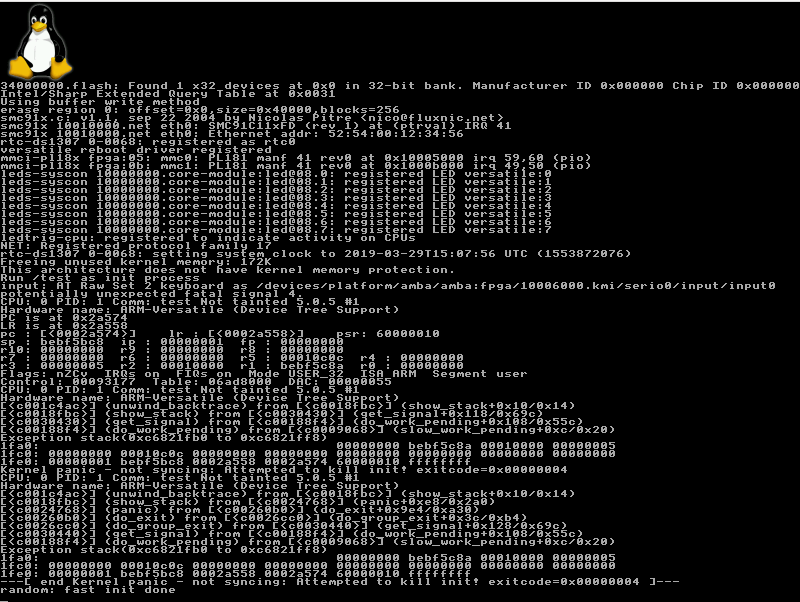
UPDATE, changed a few things arround. Crosstools would now only make the tools (test it) and then youd use build with a arch command.
as seen in picture, my static linked init dint get compiled against 5.0.5 kernel headers but to 3.2.0, ill fix that someday maybe
this is work in progress
To do crosscompiling ive made a script called "crosstools.sh" that will add crosscompile tools if you dont have any. From here on the variable arch can be set to the arch you made crostools for.
crosscompile.sh will build a arm based kernel and tries to boot it using qemu, for succesfull compiling, requires: arm-none-eabi- series.
./crosscompile.shor to delete the compile attempt (without removing large downloaded files)
./crosscompile.sh -dneeded GPG keys for linux, patch and glibc headers:
79BE3E4300411886
38DBBDC86092693E
16792B4EA25340F8gpg --keyserver hkps://pgp.mit.edu --recv-keys 79BE3E4300411886 38DBBDC86092693E 16792B4EA25340F8These tools are 32bit, and for Powerpc G5 we need 64bits. And browsing the Arch forums... yeah, general public intrests.... they go with the dodo. Lets make our own Distro, with Doom and Anime... I mean documentries on space and sciense.
git clone https://aur.archlinux.org/powerpc64-linux-gnu-binutils.git
cd powerpc64-linux-gnu-binutils/
makepkg -si
cd ..git clone https://aur.archlinux.org/powerpc-linux-gnu-binutils.git
cd powerpc-linux-gnu-binutils/
makepkg -si
cd ..git clone https://aur.archlinux.org/powerpc-linux-gnu-linux-api-headers.git
cd powerpc-linux-gnu-linux-api-headers/
makepkg -si
cd ..git clone https://aur.archlinux.org/powerpc-linux-gnu-gcc-stage1.git
cd powerpc-linux-gnu-gcc-stage1/
makepkg -si
cd ..git clone https://aur.archlinux.org/powerpc-linux-gnu-glibc-headers.git
cd powerpc-linux-gnu-glibc-headers/
makepkg -si
cd ..git clone https://aur.archlinux.org/powerpc-linux-gnu-gcc-stage2.git
cd powerpc-linux-gnu-gcc-stage2/
makepkg -si
cd ..git clone https://aur.archlinux.org/powerpc-linux-gnu-glibc.git
cd powerpc-linux-gnu-glibc/
makepkg -si
cd ..git clone https://aur.archlinux.org/powerpc-linux-gnu-gcc.git
cd powerpc-linux-gnu-gcc/
makepkg -si
cd ..Write a file containing:
#include<stdio.h>
int main () {
printf("Hello PowerPC!\n");
return 0;
}powerpc-linux-gnu-gcc -static -g hello.cpp -o hello
qemu-ppc hellothis is work in progress
git clone https://github.com/raspberrypi/linux raspberrypi-linux
cd raspberrypi-linux
cp arch/arm/configs/bcmrpi_cutdown_defconfig .config
make ARCH=arm CROSS_COMPILE=/usr/bin/arm-linux-gnueabi- oldconfig
make ARCH=arm CROSS_COMPILE=/usr/bin/arm-linux-gnueabi- menuconfig
make ARCH=arm CROSS_COMPILE=/usr/bin/arm-linux-gnueabi- -kor do some defconfig for ppc
make -j 4 [u|z]Image dtbs modules
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabi-export ARCH:=arm
export CROSS_COMPILE:=arm-none-linux-gnueabi-
ARCH=arm
COMPILER=arm-none-linux-gnueabi
obj-m := Hello.o
KERNELDIR := /home/ravi/workspace/hawk/linux-omapl1
PWD := $(shell pwd)
default:
$(MAKE) -C $(KERNELDIR) M=$(PWD) ARCH=$(ARCH) CROSS_COMPILE=$(COMPILER) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(PWD) ARCH=$(ARCH) clean
ARCH := arm
CROSS_COMPILE := arm-none-linux-gnueabi-
obj-m := Hello.o
KDIR := /home/ravi/workspace/hawk/linux-omapl1
PWD := $(shell pwd)
export
default:
$(MAKE) -C $(KDIR) M=$(PWD) modules
clean:
$(MAKE) -C $(KDIR) M=$(PWD) cleana device tree database is required for proper functioning arm targets, for my example ive used versatile-pb.dtb that is also provided after compiling the kernel.
The following resources where used making this project or helped solve problems. "Attribution" as per stackoverflow. as some code might have evolved away from the "answers", I choose to put the links here under headings of general meaning. The link titles are describtive enough.
- https://gts3.org/2017/cross-kernel.html
- https://balau82.wordpress.com/2010/02/28/hello-world-for-bare-metal-arm-using-qemu/
- https://github.com/netbeast/docs/wiki/Cross-compile-test-application
- http://preshing.com/20141119/how-to-build-a-gcc-cross-compiler/
- http://www.clfs.org/view/CLFS-3.0.0-SYSTEMD/ppc64-64/materials/packages.html
- https://stackoverflow.com/questions/33450401/building-gcc-make-all-error-2
- https://gcc.gnu.org/ml/gcc-help/2012-07/msg00018.html
- https://www.computerhope.com/unix/ucpio.htm
- https://unix.stackexchange.com/questions/56614/send-file-by-xmodem-or-kermit-protocol-with-gnu-screen/65362#65362
- https://www.computerhope.com/unix/ucpio.htm
- https://unix.stackexchange.com/questions/56614/send-file-by-xmodem-or-kermit-protocol-with-gnu-screen/65362#65362
- https://www.lifewire.com/bash-for-loop-examples-2200575
- https://landley.net/aboriginal/bin/
- https://stackoverflow.com/questions/46695403/how-to-add-a-carriage-return-with-sed
- https://blog.christophersmart.com/2016/08/31/configuring-qemu-bridge-helper-after-access-denied-by-acl-file-error/
Some people dislike bash, and set their default shell to something else then bash. This leads to incompatibilities between "scripts" and thus require minor and sometimes mayor code changes to support these different shells. I cannot test them all, but I try to make them compatible. for now, bash is the default. I might consider zsh.
For teenylinux ive swapped to (d)ash (sh like) and this also required profile change:
- https://linux.die.net/man/1/ash
- https://unix.stackexchange.com/questions/176027/ash-profile-configuration-file
- https://www.in-ulm.de/%7Emascheck/various/ash/
- https://stackoverflow.com/questions/58924424/why-does-gdb-does-not-show-debug-symbols-of-kernel-with-debug-info
- https://github.com/amezin/vscode-linux-kernel
- https://www.kernel.org/doc/html/v4.10/dev-tools/gdb-kernel-debugging.html
- https://elinux.org/Debugging_The_Linux_Kernel_Using_Gdb
- https://www.starlab.io/blog/using-gdb-to-debug-the-linux-kernel
- https://sourceware.org/gdb/onlinedocs/gdb/Auto_002dloading-safe-path.html
- https://www.kernel.org/doc/Documentation/dev-tools/gdb-kernel-debugging.rst
- https://stackoverflow.com/questions/17939930/finding-out-what-the-gcc-include-path-is
- https://stackoverflow.com/questions/2188751/linking-iostream-h-in-linux-using-gcc/2188765#2188765
- https://gts3.org/2017/cross-kernel.html
- https://balau82.wordpress.com/2010/02/28/hello-world-for-bare-metal-arm-using-qemu/
- https://github.com/netbeast/docs/wiki/Cross-compile-test-application
- https://balau82.wordpress.com/2010/03/22/compiling-linux-kernel-for-qemu-arm-emulator/
- https://designprincipia.com/compile-linux-kernel-for-arm-and-run-on-qemu/
- https://stackoverflow.com/questions/49391116/build-newlib-with-existing-cross-compiler
- https://wiki.osdev.org/Porting_Newlib
- https://github.com/john-tipper/Cross-compile-toolchain-for-linux-on-OSX/
- https://stackoverflow.com/questions/11307465/destdir-and-prefix-of-make
- https://www.monperrus.net/martin/compiling-c-code-with-dietlibc-and-tcc
- https://linuxhandbook.com/bash-arrays/
- https://www.cyberciti.biz/faq/finding-bash-shell-array-length-elements/
Resolved a init kernel problem: https://stackoverflow.com/questions/15277570/simple-replacement-of-init-to-just-start-console
timing: