Notation
The figure below illustrates the notation that is used in SVO.
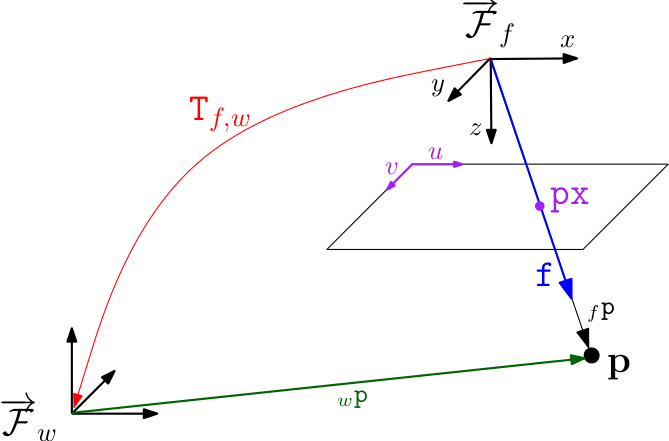
px - Pixel coordinate (u,v)
f - Bearing vector of unit length (x,y,z)
T_f_w - Rigid body transformation from world frame w to camera frame f. This transformation transforms a point in world coordinates p_w to a point in frame coordinates p_f as follows: p_f = T_f_w * p_w. The camera position in world coordinates must be obtained by inversion: pos = T_f_w.inverse().translation()