DEPRECATED - PLEASE USE OWL INSTEAD
The repository contains rapid prototype implementations of motion planners and their variants, version 0.1.0.
The code includes experimental features that in their current form should not make their way to a live robot. We have extracted and refined the approved methods to the repository owl.
List of algorithms: GLC, RRT*
The references are
- A Generalized Label Correcting Method for Optimal Kinodynamic Motion Planning by Brian Paden and Emilio Frazzoli, arXiv:1607.06966
- Sampling-based algorithms for optimal motion planning by Sertac Karaman and Emilio Frazzoli, IJRR11
The following integrators are available:
- Euler, Midpoint
- Runge-Kutta 4th order, and 5th order
- exact integrator for the group SE2
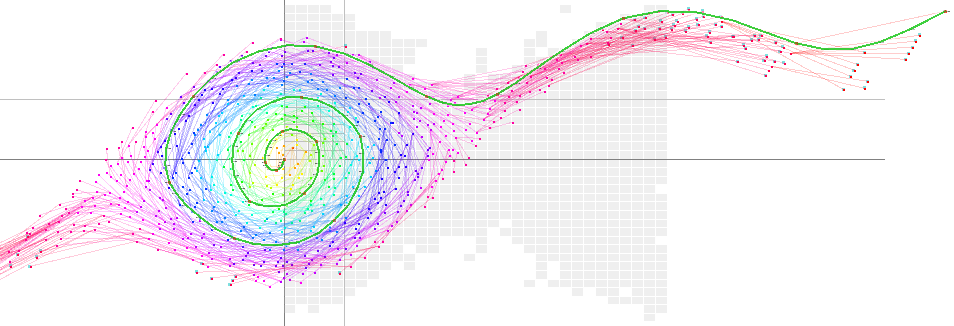
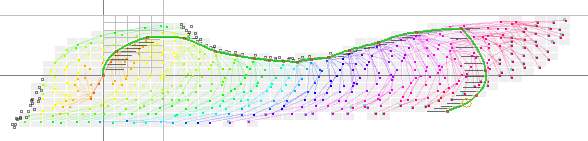
The owly repository implements visualizations in 2D as showcased below.
See also a video.
The separate repository owly3d implements animations and visualizations in 3D.
Rice2: 4-dimensional state space + time
|
|
|


SE2: 3-dimensional state space
|
Car
|
Two-wheel drive (with Lidar simulator)
|


Tracking of potential locations of pedestrians and vehicles

Pendulum Swing Up
Rice1
R^2


Lotka-Volterra: predator and prey, control by decay rate of predators
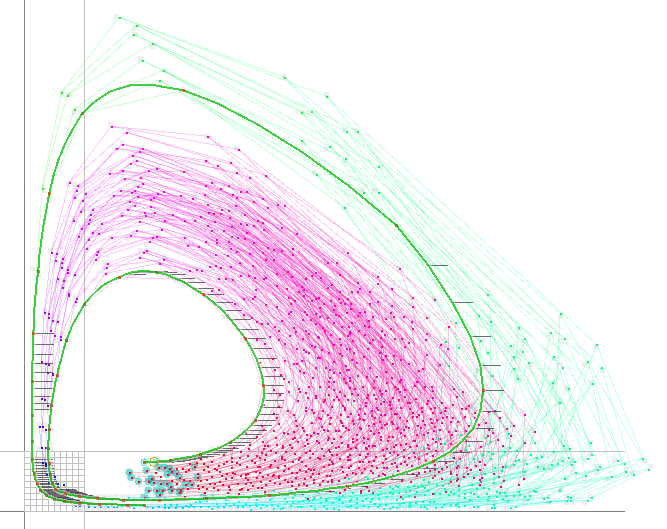
surface flow in river delta

against the direction of current

current reversed

R^2

R^2


Jan Hakenberg, Jonas Londschien, Yannik Nager