{
ID: 'uint32', //text ID.
TimeStamp: 'uint32', //timestamp of the frame arriving, started from initialization of CAN controller
TimeFlag: 'uint8', // if using timestamp, 1: use TimeStamp, 0��not use. TimeFlag and TimeStamp is available when the frame is received frame
SendType: 'uint8', //send frame type. 0: normal send, 1: single send, 2: self send/receive, 3: single self send/receive, only available when
//the frame is send frame.(when device type is EG20T-CAN, send type will be set at VCI_InitCan and it's invalid set herein
//When set to self send/receive mode, EG20T-CAN can not receive from bus, only can receive from itself)
RemoteFlag: 'uint8', //remote frame flag
ExternFlag: 'uint8', //extended frame flag
DataLen: 'uint8', //Data length(<=8), how many uint8_ts of data
Data: refArray('uint8', 8), //text data
Reserved: refArray('uint8', 3) //reserved
}
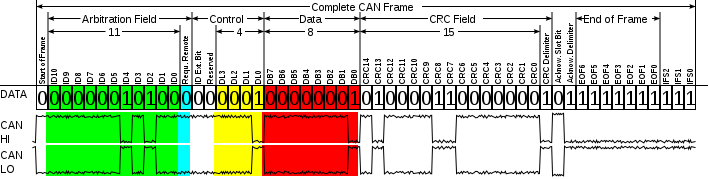
Now we focus on the Data field (red), it has 0–64 (0-8 bytes) Data to be transmitted (length dictated by DLC field).
Our protocol is as follow:
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| sensorType | data index | total number | data length (1-4)Bytes | sensor data | sensor data | sensor data | sensor data |
Transmit :
Data[0] : sensorType enum
Data[1] : index of sensor
Data[2] : total number of sensors in C21
Data[3] : data length(1-4)
Data[4] - [7] : data
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| commandID | paramter description | params | params | params | params | params | params |
Receive:
Data[0] : commondID enum
Data[1] : 4-bit param number + 4-bit param data length
Data[2] - Data[7] : paramter