![]()
This project starts with 223GB of Driving Data open sourced by Udacity. The originial idea was to hack this driving dataset, the associated app and data hosted on AWS by Streamlit
Hybrid training of a self-driving car, based on both images from:
| real driving data | simulation data |
|---|---|
 |
 |
For more project on autonomous driving simulation:
- https://github.com/slevin48/gta
- https://github.com/slevin48/carla
- https://github.com/slevin48/donkeycar
Youtube - Neural Network driving a car
NVIDIA paper: End to End Learning for Self-Driving Cars
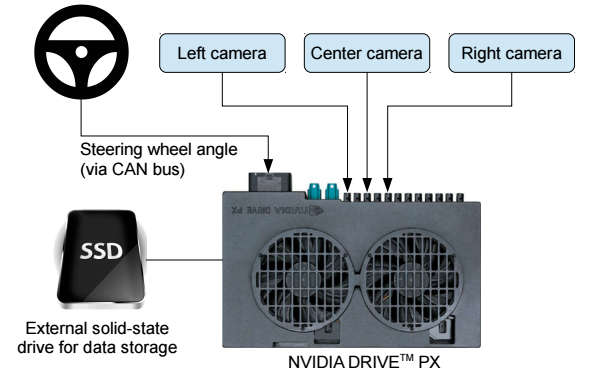
First Download the Driving Datasets – Over 10 hours of driving data (LIDAR, camera frames and more)
aria2c Ch2_001.tar.gz-692ee7e0c63fb2212bfe4a62a39ce71ee9b16fb3.torrent
Read How to download torrents from the command-line on Linux
Untar
tar -xf Ch2_001.tar.gz
Build the docker
docker build -t udacity-reader .
Run the ROS bag reader
./run-bagdump.sh -i /data -o /output
{kind=link}
>> bag = rosbag('CH03_002')
BagSelection with properties:
FilePath: 'C:\Users\slevin\Downloads\self-driving\CH3_002\CH03_002'
StartTime: 1.4807e+09
EndTime: 1.4807e+09
NumMessages: 54456557
AvailableTopics: [36×3 table]
AvailableFrames: {0×1 cell}
MessageList: [54456557×4 table]Available Topics:
/can_bus_dbw/can_rx 9376489 msgs : dataspeed_can_msgs/CanMessageStamped
/center_camera/camera_info 264230 msgs : sensor_msgs/CameraInfo
/center_camera/image_color/compressed 264230 msgs : sensor_msgs/CompressedImage
/diagnostics 52540 msgs : diagnostic_msgs/DiagnosticArray (4 connections)
/ecef/ 5287720 msgs : geometry_msgs/PointStamped
/fix 5287720 msgs : sensor_msgs/NavSatFix
/imu/data 5287726 msgs : sensor_msgs/Imu
/left_camera/camera_info 264276 msgs : sensor_msgs/CameraInfo
/left_camera/image_color/compressed 264276 msgs : sensor_msgs/CompressedImage
/pressure 660965 msgs : sensor_msgs/FluidPressure
/right_camera/camera_info 263840 msgs : sensor_msgs/CameraInfo
/right_camera/image_color/compressed 263840 msgs : sensor_msgs/CompressedImage
/time_reference 16020574 msgs : sensor_msgs/TimeReference
/vehicle/brake_info_report 660965 msgs : dbw_mkz_msgs/BrakeInfoReport
/vehicle/brake_report 659917 msgs : dbw_mkz_msgs/BrakeReport
/vehicle/dbw_enabled 1 msg : std_msgs/Bool
/vehicle/filtered_accel 659858 msgs : std_msgs/Float64
/vehicle/fuel_level_report 132671 msgs : dbw_mkz_msgs/FuelLevelReport
/vehicle/gear_report 263943 msgs : dbw_mkz_msgs/GearReport
/vehicle/gps/fix 13219 msgs : sensor_msgs/NavSatFix
/vehicle/gps/time 13219 msgs : sensor_msgs/TimeReference
/vehicle/gps/vel 13219 msgs : geometry_msgs/TwistStamped
/vehicle/imu/data_raw 1318634 msgs : sensor_msgs/Imu
/vehicle/joint_states 1981787 msgs : sensor_msgs/JointState
/vehicle/misc_1_report 263944 msgs : dbw_mkz_msgs/Misc1Report
/vehicle/sonar_cloud 66768 msgs : sensor_msgs/PointCloud2
/vehicle/steering_report 659858 msgs : dbw_mkz_msgs/SteeringReport
/vehicle/surround_report 66768 msgs : dbw_mkz_msgs/SurroundReport
/vehicle/suspension_report 661052 msgs : dbw_mkz_msgs/SuspensionReport
/vehicle/throttle_info_report 1321946 msgs : dbw_mkz_msgs/ThrottleInfoReport
/vehicle/throttle_report 659914 msgs : dbw_mkz_msgs/ThrottleReport
/vehicle/tire_pressure_report 26438 msgs : dbw_mkz_msgs/TirePressureReport
/vehicle/twist_controller/parameter_descriptions 1 msg : dynamic_reconfigure/ConfigDescription
/vehicle/twist_controller/parameter_updates 1 msg : dynamic_reconfigure/Config
/vehicle/wheel_speed_report 1321929 msgs : dbw_mkz_msgs/WheelSpeedReport
/velodyne_packets 132079 msgs : velodyne_msgs/VelodyneScan
GPS
bagGps = select(bag, 'Topic', '/vehicle/gps/fix');
Steering Angle
bagSteering = select(bag, 'Topic', '/vehicle/steering_report');bagSteering.AvailableTopics
msgs = readMessages(bagSteering,'DataFormat','struct');
steering_angle = cellfun(@(m) m.SteeringWheelAngle,msgs);
Sec = cellfun(@(m) m.Header.Stamp.Sec,msgs);
Nsec = cellfun(@(m) m.Header.Stamp.Nsec,msgs);
time = datetime(Sec,"ConvertFrom","epochtime","Format","HH:mm:ss");
plot(time,steering_angle)
title("Steering Wheel Angle")
Retime: sub-sample to one point per second to sync with GPS

Pressure
>> bagpressure = select(bag, 'Topic', '/pressure')
bagpressure =
BagSelection with properties:
FilePath: 'C:\Users\slevin\Downloads\self-driving\CH3_002\CH03_002'
StartTime: 1.4807e+09
EndTime: 1.4807e+09
NumMessages: 660965
AvailableTopics: [1×3 table]
AvailableFrames: {0×1 cell}
MessageList: [660965×4 table]IMU (Inertial Measurement Unit)
>> bagselect1 = select(bag, 'Topic', '/imu/data')
bagselect1 =
BagSelection with properties:
FilePath: 'C:\Users\slevin\Downloads\self-driving\CH3_002\CH03_002'
StartTime: 1.4807e+09
EndTime: 1.4807e+09
NumMessages: 5287726
AvailableTopics: [1×3 table]
AvailableFrames: {0×1 cell}
MessageList: [5287726×4 table]We have more than 5 million messages, so we will filter to get only the first 30 seconds:
>> start = bag.StartTime;
>> bagselect2 = select(bag, 'Time', [start start + 30], 'Topic', '/imu/data')
bagselect2 =
BagSelection with properties:
FilePath: 'C:\Users\slevin\Downloads\self-driving\CH3_002\CH03_002'
StartTime: 1.4807e+09
EndTime: 1.4807e+09
NumMessages: 12001
AvailableTopics: [1×3 table]
AvailableFrames: {0×1 cell}
MessageList: [12001×4 table]Read selected message data
>> msgs = readMessages(bagselect2);
>> msgs{1}
ans =
ROS Imu message with properties:
MessageType: 'sensor_msgs/Imu'
Header: [1×1 Header]
Orientation: [1×1 Quaternion]
AngularVelocity: [1×1 Vector3]
LinearAcceleration: [1×1 Vector3]
OrientationCovariance: [9×1 double]
AngularVelocityCovariance: [9×1 double]
LinearAccelerationCovariance: [9×1 double]
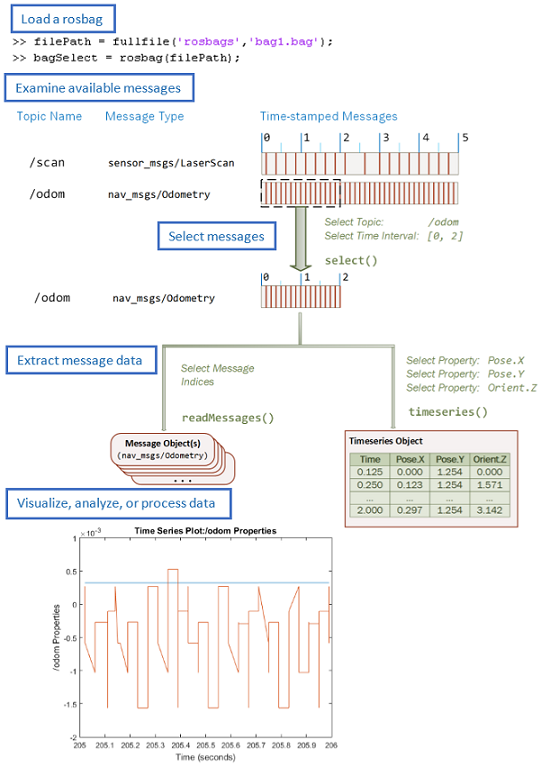
Use showdetails to show the contents of the messageRead as timeseries
>> ts = timeseries(bagselect2)
timeseries
Common Properties:
Name: '/imu/data Properties'
Time: [12001x1 double]
TimeInfo: [1x1 tsdata.timemetadata]
Data: [12001x13 double]
DataInfo: [1x1 tsdata.datametadata]
More properties, Methodsfigure
plot(ts, 'LineWidth', 3)
Host the real driving dataset on AWS S3 bucket, and allow public access to the bucket
Access Photos from Python, by building a list (save list to CSV)
import os
import pandas as pd
list = os.listdir()
df = pd.DataFrame(list,columns=['photo'])
df.to_csv('photos.csv',index=False)Display frames & steering angle with a streamlit app:

streamlit run car_app.py

streamlit run car_app.py
(Turn on wide mode in settings in the upper right of the app)
From the Karlsruhe Institute of Technology:
- https://github.com/tawnkramer/sdsandbox
- https://github.com/naokishibuya/car-behavioral-cloning
- https://github.com/llSourcell/How_to_simulate_a_self_driving_car
- https://github.com/ManajitPal/DeepLearningForSelfDrivingCars
- https://www.youtube.com/watch?v=EaY5QiZwSP4&ab_channel=SirajRaval
- https://developer.nvidia.com/blog/deep-learning-self-driving-cars/
- https://github.com/SullyChen/Autopilot-TensorFlow
