

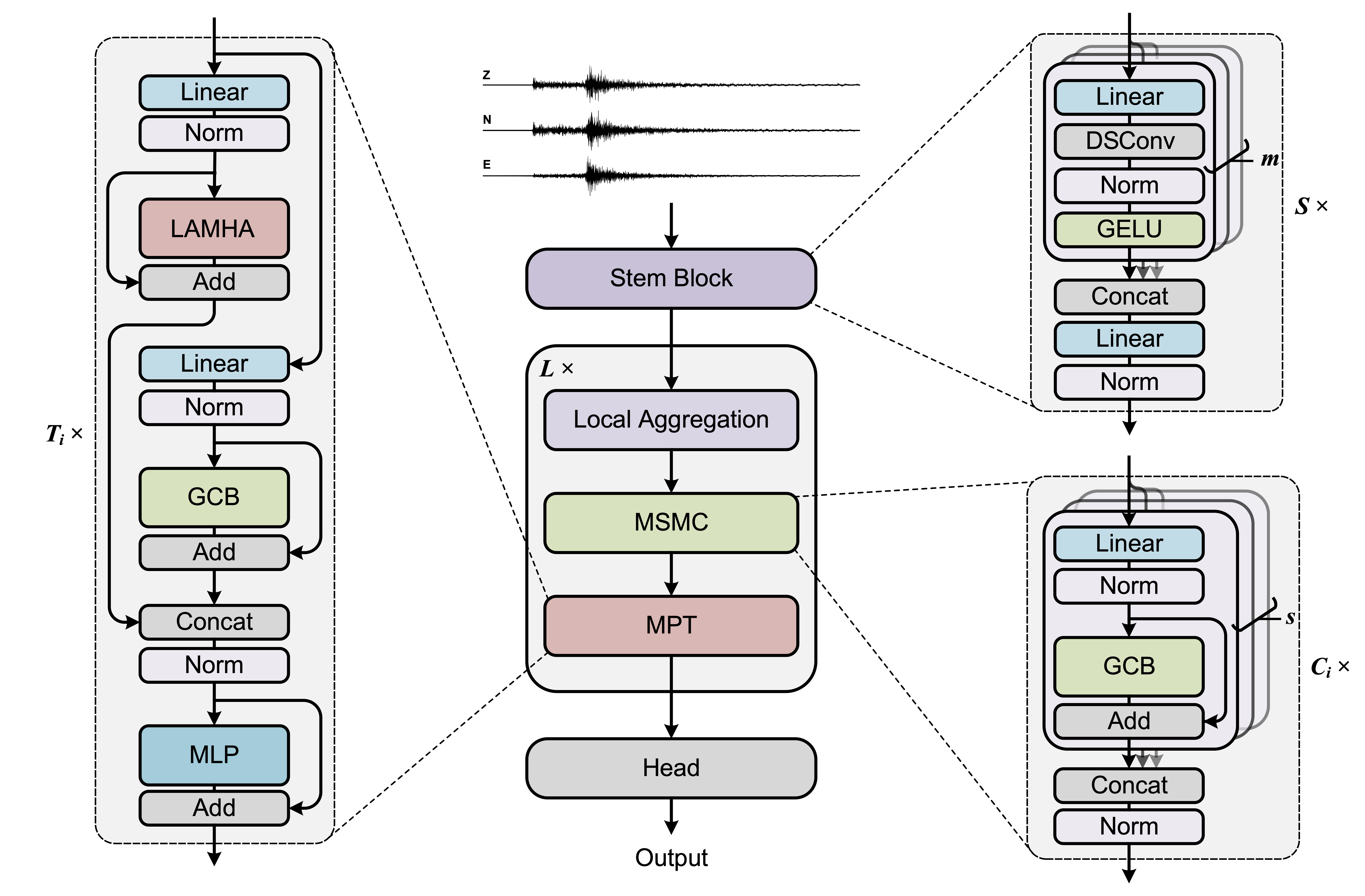
SeisT is a backbone for seismic signal processing, which can be used for multiple seismic monitoring tasks such as earthquake detection, seismic phase picking, first-motion polarity classification, magnitude estimation, back-azimuth estimation, and epicentral distance estimation.
This repository also provides some baseline models implemented by Pytorch under ./models, such as PhaseNet, EQTransformer, DitingMotion, MagNet, BAZ-Network, and distPT-Network.
NOTE: The model weights included in this repository serve as the basis for performance evaluation in the paper. They have been evaluated using identical training and testing data and a consistent training regimen, thereby affirming the architecture's validity. Nevertheless, if you intend to employ these models in practical engineering applications, it is crucial to retrain the SeisT models with larger datasets to align with the specific demands of engineering applications.
-
For training and evaluation
Create a new file named
yourdata.pyin the directorydataset/to read the metadata and seismograms of the dataset. And you need to use@register_datasetdecorator to register your dataset.(Please refer to the code samples
datasets/DiTing.pyanddatasets/PNW.py) -
For model deployment
Follow the steps in
demo_predict.pyand overload theload_datafunction.
-
Model
Before starting training, please make sure that your model code is in the directorymodels/and register it using the@register_modeldecorator. You can inspect the models available in the project using the following method:>>> from models import get_model_list >>> get_model_list() ['seist_s_dpk', 'seist_m_dpk', 'seist_l_dpk', 'seist_s_pmp', 'seist_m_pmp', 'seist_l_pmp', 'seist_s_emg', 'seist_m_emg', 'seist_l_emg', 'seist_s_baz', 'seist_m_baz', 'seist_l_baz', 'seist_s_dis', 'seist_m_dis', 'seist_l_dis', 'eqtransformer', 'phasenet', 'magnet', 'baz_network', 'distpt_network', 'ditingmotion']
The task names and their abbreviations in this project are shown in the table below:
Task Abbreviation Detection & Phase Picking dpk First-Motion Polarity Classification pmp Back-Azimuth Estimation baz Magnitude Estimation emg Epicentral Distance Estimation dis -
Model Configuration
The configuration of the loss function and model labels is inconfig.py, and a more detailed explanation is provided in this file. -
Start training
If you are training with a CPU or a single GPU, please use the following command to start training:python main.py \ --seed 0 \ --mode "train_test" \ --model-name "seist_m_dpk" \ --log-base "./logs" \ --device "cuda:0" \ --data "/root/data/Datasets/Diting50hz" \ --dataset-name "diting" \ --data-split true \ --train-size 0.8 \ --val-size 0.1 \ --shuffle true \ --workers 8 \ --in-samples 8192 \ --augmentation true \ --epochs 200 \ --patience 30 \ --batch-size 500
If you are training with multiple GPUs, please use
torchrunto start training:torchrun \ --nnodes 1 \ --nproc_per_node 2 \ main.py \ --seed 0 \ --mode "train_test" \ --model-name "seist_m_dpk" \ --log-base "./logs" \ --data "/root/data/Datasets/Diting50hz" \ --dataset-name "diting" \ --data-split true \ --train-size 0.8 \ --val-size 0.1 \ --shuffle true \ --workers 8 \ --in-samples 8192 \ --augmentation true \ --epochs 200 \ --patience 30 \ --batch-size 500There are also many other custom arguments, see
main.pyfor more details.
The following table provides the pre-trained checkpoints used in the paper:
| Task | Train set | SeisT-S | SeisT-M | SeisT-L |
|---|---|---|---|---|
| Detection & Phase Picking | DiTing | download | download | download |
| First-Motion Polarity Classification | DiTing | download | download | download |
| Back-Azimuth Estimation | DiTing | download | download | download |
| Magnitude Estimation | DiTing | download | download | download |
| Magnitude Estimation | PNW | download | download | download |
| Epicentral Distance Estimation | DiTing | download | download | download |
Use the "--checkpoint" argument to pass in the path of the pre-training weights.
If you are testing with a CPU or a single GPU, please use the following command to start testing:
python main.py \
--seed 0 \
--mode "test" \
--model-name "seist_m_dpk" \
--log-base "./logs" \
--device "cuda:0" \
--data "/root/data/Datasets/Diting50hz" \
--dataset-name "diting" \
--data-split true \
--train-size 0.8 \
--val-size 0.1 \
--workers 8 \
--in-samples 8192 \
--batch-size 500If you are testing with multiple GPUs, please use torchrun to start testing:
torchrun \
--nnodes 1 \
--nproc_per_node 2 \
main.py \
--seed 0 \
--mode "test" \
--model-name "seist_m_dpk" \
--log-base "./logs" \
--data "/root/data/Datasets/Diting50hz" \
--dataset-name "diting" \
--data-split true \
--train-size 0.8 \
--val-size 0.1 \
--workers 8 \
--in-samples 8192 \
--batch-size 500It should be noted that the train_size and val_size during testing must be consistent with that during training, and the seed must be consistent. Otherwise, the test results may be distorted.
Paper: https://doi.org/10.1109/TGRS.2024.3371503
If you find this repo useful in your research, please consider citing:
@ARTICLE{10453976,
author={Li, Sen and Yang, Xu and Cao, Anye and Wang, Changbin and Liu, Yaoqi and Liu, Yapeng and Niu, Qiang},
journal={IEEE Transactions on Geoscience and Remote Sensing},
title={SeisT: A Foundational Deep-Learning Model for Earthquake Monitoring Tasks},
year={2024},
volume={62},
pages={1-15},
doi={10.1109/TGRS.2024.3371503}
}
The baseline models used in this paper:
-
PhaseNet
Zhu, W., & Beroza, G. C. (2019). PhaseNet: A deep-neural-network-based seismic arrival-time picking method. Geophysical Journal International, 216(1), 261-273. -
EQTransformer
Mousavi, S. M., Ellsworth, W. L., Zhu, W., Chuang, L. Y., & Beroza, G. C. (2020). Earthquake transformer—an attentive deep-learning model for simultaneous earthquake detection and phase picking. Nature communications, 11(1), 3952. -
DiTingMotion
Zhao, M., Xiao, Z., Zhang, M., Yang, Y., Tang, L., & Chen, S. (2023). DiTingMotion: A deep-learning first-motion-polarity classifier and its application to focal mechanism inversion. Frontiers in Earth Science, 11, 1103914. -
MagNet
Mousavi, S. M., & Beroza, G. C. (2020). A machine‐learning approach for earthquake magnitude estimation. Geophysical Research Letters, 47(1), e2019GL085976. -
BAZ-Network
Mousavi, S. M., & Beroza, G. C. (2020). Bayesian-Deep-Learning Estimation of Earthquake Location From Single-Station Observations. IEEE Transactions on Geoscience and Remote Sensing, 58(11), 8211-8224.
Report bugs at https://github.com/senli1073/SeisT/issues.
If you are reporting a bug, please include:
- Operating system version.
- Versions of Python and libraries such as Pytorch.
- Steps to reproduce the bug.
This project refers to some excellent open source projects: PhaseNet, EQTransformer, DiTing-FOCALFLOW, MagNet, Deep-Bays-Loc, PNW-ML and SeisBench.
Copyright S.Li et al. 2023. Licensed under an MIT license.