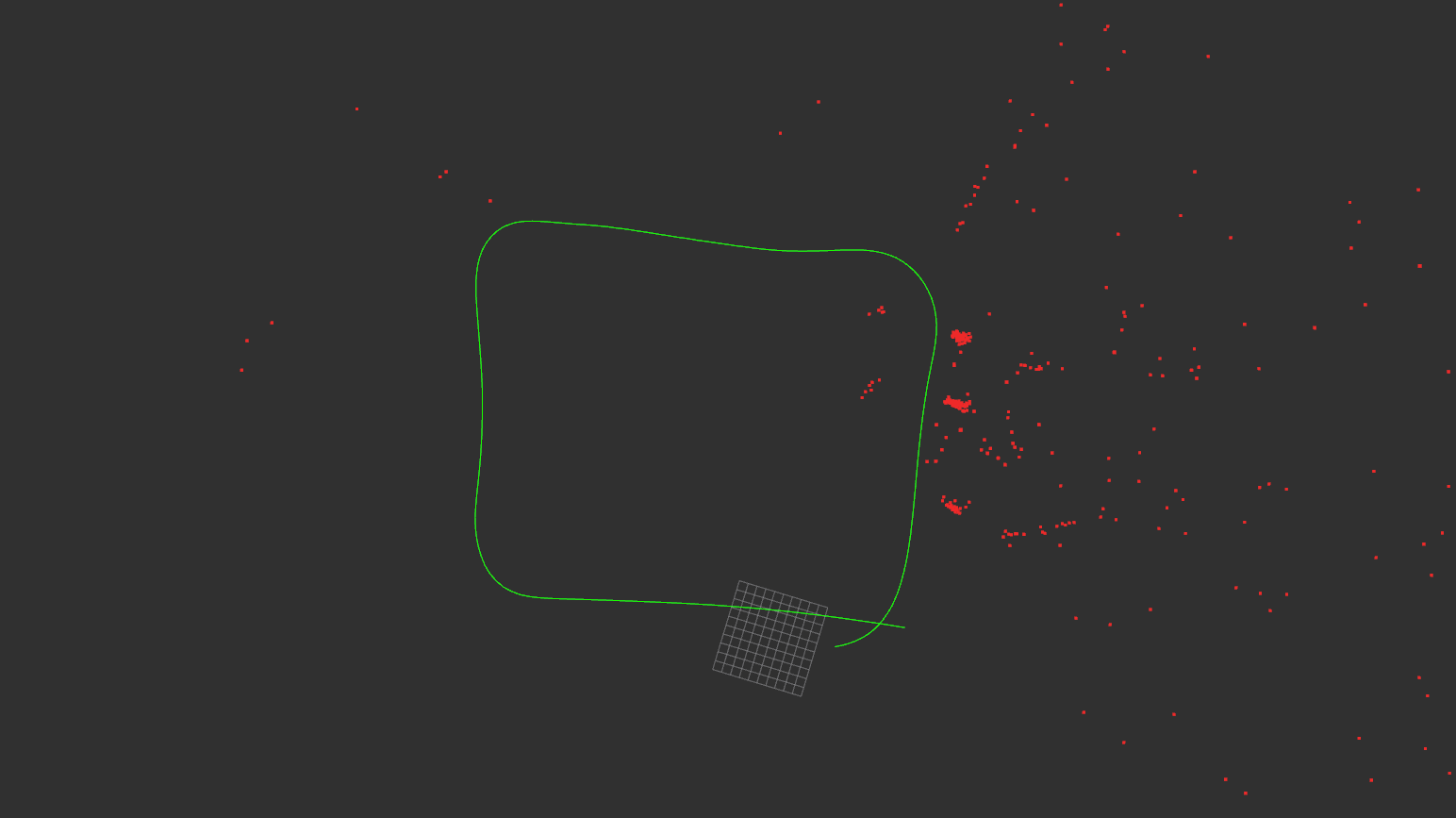
This project is designed for students to learn the front-end and back-end in a Simultaneous Localization and Mapping (SLAM) system. The objective is that using feature_tracker in VINS-MONO as front-end, and GTSAM as back-end to implement a visual inertial odometry (VIO) algorithm for real-data collected by a vehicle: The MVSEC Dataset. The code is modified based on original code from CPI.
Specifically, we are learning how to utilize a front-end package and use IMUFactor, SmartProjectionPoseFactor and ISAM2 optimizer in GTSAM to achieve a simple but straight-forward VIO system.
Install ROS:
Ubuntu 18.04: http://wiki.ros.org/melodic/Installation/Ubuntu.
Ubuntu 16.04: http://wiki.ros.org/kinetic/Installation/Ubuntu.
Install GTSAM as a thirdparty: https://github.com/borglab/gtsam.
Clone this ros workspace:
$ git clone https://github.com/ganlumomo/VisualInertialOdometry.gitTry out the feature_tracker package to see how does it work and what does it output.
Refer examples ImuFactorsExample.cpp and ISAM2Example_SmartFactor.cpp to implement the following functions defined in GraphSolver.h:
// For IMU preintegration
set_imu_preintegration
create_imu_factor
get_predicted_state
reset_imu_integration
// For smart vision factor
process_feat_smartYou are free to change the function signature, but make sure change other places accordingly.
Build the code and launch the ros node with rosbag data:
$ cd VisualInertialOdometry
$ catkin_make
$ source devel/setup.bash
$ roslaunch launch/mvsec_test.launch
$ rosbag play mvsec_test.bagTest data can be downloaded here: mvsec_test.bag.
Write one-page project summary about your implementation and result.
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator (PDF)
IMU Preintegration on Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation (PDF)
Eliminating conditionally independent sets in factor graphs: A unifying perspective based on smart factors (PDF)
The Multivehicle Stereo Event Camera Dataset: An Event Camera Dataset for 3D Perception (PDF)