We are actively updating this repository (especially removing hard code and adding comments) to make it easy to use. If you have any questions, please open an issue. Thanks!
This is a ROS-based efficient online learning framework for object classification in 3D LiDAR scans, taking advantage of robust multi-target tracking to avoid the need for data annotation by a human expert. The system is only tested in Ubuntu 18.04 and ROS Melodic (compilation fails on Ubuntu 20.04 and ROS Noetic).
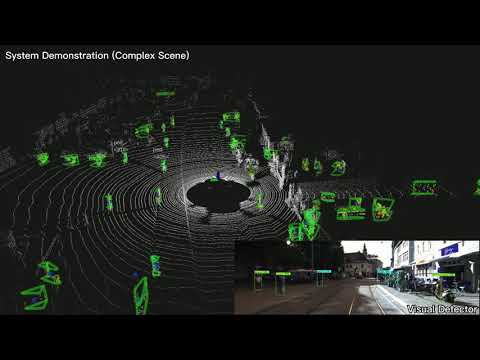
Please watch the videos below for more details.
[2023-01-11] Our evaluation results in KITTI 3D OBJECT DETECTION are ranked 276, 91, 125 in car, pedestrian and cyclist respectively.
3D Object Detection
CAR

PEDESTRIAN

CYCLIST

[2023-01-11] Our evaluation results in KITTI 2D OBJECT DETECTION achieved rankings of 22 on pedestrian and 66 on cyclist!
2D Object Detection
CAR

PEDESTRIAN

CYCLIST

Please read the readme file of each sub-package first and install the corresponding dependencies.
-
(Optional) Download the raw data from KITTI.
-
(Optional) Download the sample data for testing.
-
(Optional) Prepare a customized dataset according to the format of the sample data.
# launch/efficient_online_learning
# autoware_tracker/config/params.yaml
cd catkin_ws
source devel/setup.bash
roslaunch src/efficient_online_learning/launch/efficient_online_learning.launchIf you are considering using this code, please reference the following:
@inproceedings{efficient_online_learning,
author = {Rui Yang and Zhi Yan and Tao Yang and Yassine Ruichek},
title = {Efficient Online Transfer Learning for 3D Object Classification in Autonomous Driving},
booktitle = {Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC)},
pages = {2950--2957},
year = {2021}
}