Using pytorch to implement DQN (Deep Q Network) / DDQN (Double DQN) / Atari DDQN.
- python 3.6
- pytorch 0.4+
- tensorboard
- gym
DQN:
dqn.py --train --env CartPole-v0
DDQN:
ddqn.py --train --env CartPole-v0
Atari DDQN:
atari_ddqn.py --train --env PongNoFrameskip-v4
Parameters need to be manually adjusted within the file.
You can use the tensorboard to see the training.
tensorboard --logdir=out/CartPole-v0-run0
For dqn.py, ddqn.py and atari_ddqn.py, you use --test like this:
ddqn.py --test --env CartPole-v0 --model_path out/CartPole-v0-run23/model_best.pkl
It will render graphical interface.
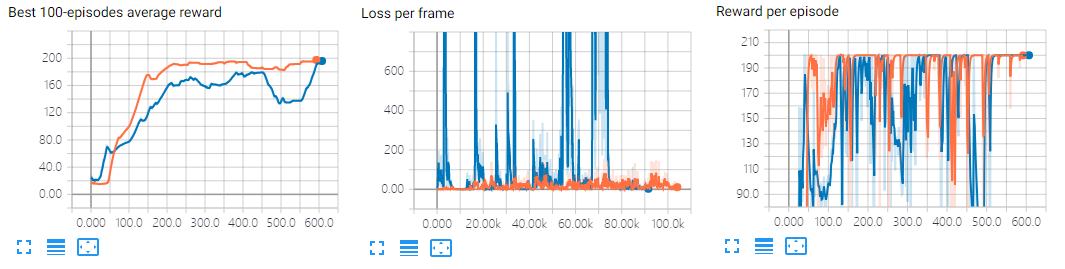
I trained CartPole-v0 environment with dqn and ddqn. (Blue is dqn, and orange is ddqn)
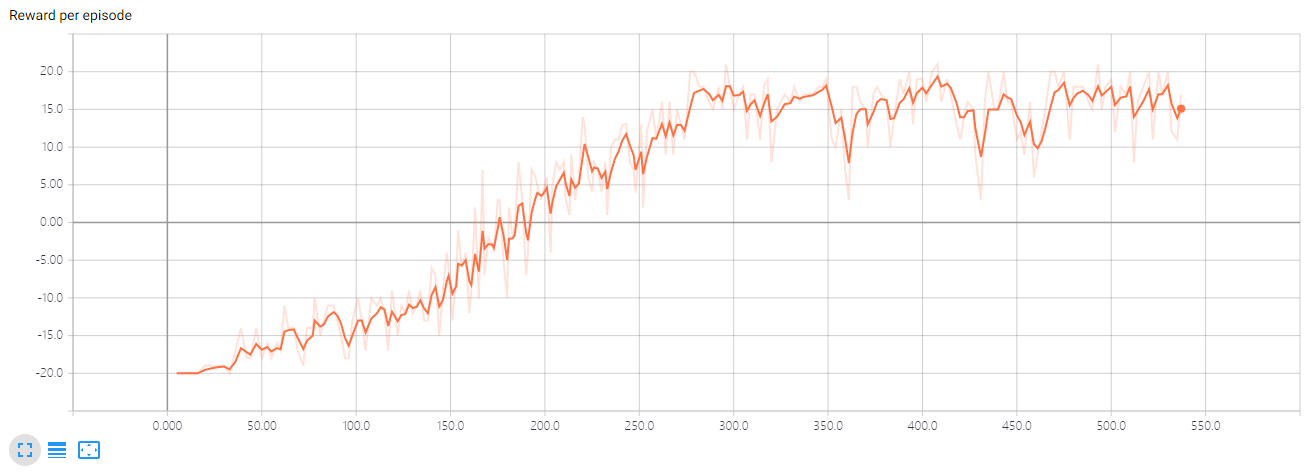
Training Atari game PongNoFrameskip-v4 two million step.