


Cosserat model has been introduced in continuum robotics to simulate the deformation of the robot body whose geometry and mechanical characteristics are similar to a rod. By extension, this model can be used to simulate needles, wires. The specificity of Cosserat's theory from the point of view of the mechanics of continuous media, is to consider that: each material point of an object is rigid body(3 translations, 3 rotations), where most other models of continuum media mechanics consider the material point as particles (3 translations). For the modeling of linear structures, it is therefore possible to find a framework very close to the articulated solids with a series of rigid body whose relative position is defined by a strain state. This model can be used to model and control concentric tube robots, continuum robots actuated with cables, or pneumatic soft robots with a constant cross-section.
- Pieces-wise constant Strain PCS: This feature is base on the paper
- Discrete cosserat approach for soft robot dynamics: A new piece-wise constant strain model with torsion and shears Link to the paper
- Coupling numerical deformable models in global and reduced coordinates for the simulation of the direct and the inverse kinematics of Soft Robots Link to the paper
- Pieces-wise Non-constant Strain:
- DCM with Plastic model
| View 1 | View 2 | View 3 |
|---|---|---|
 |
 |
 |
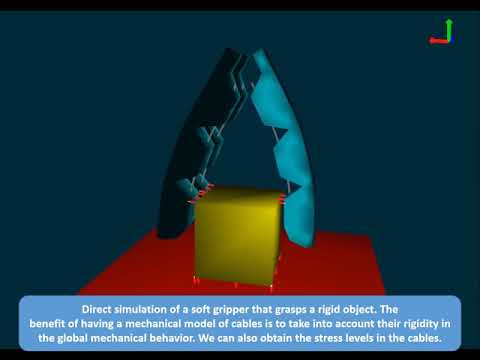
| Direct simulation of a soft gripper | The study the model convergence |
|---|---|
 |
 |
 |
 |
 |
|---|---|---|
DCM Beam actuation using a cable d = |
DCM Beam actuation using a cable d = |
Beam actuation using a cable d = |
 |
 |
|
|---|---|---|
DCM Beam actuation using a cable d = |
DCM Beam actuation using a cable d = |
Beam actuation using a cable d = |
Format: ![Alt Text]