This fork is pretty close to upstream OpenSfM, but includes changes specific to ODM.
Please note that all such changes are released under the AGPLv3 license, not BSD.
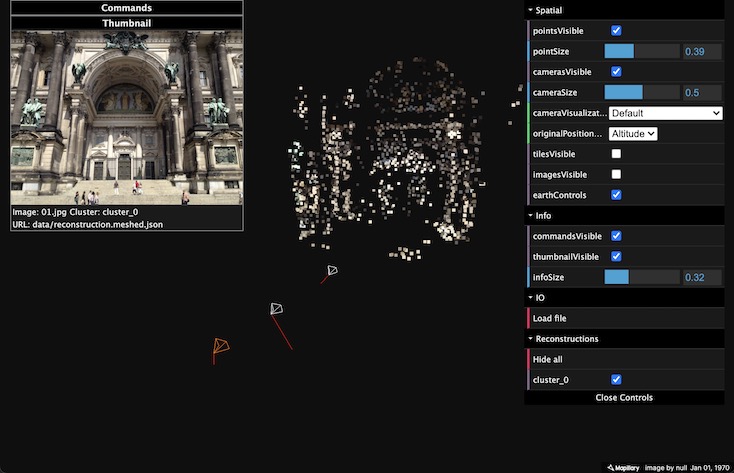
OpenSfM is a Structure from Motion library written in Python. The library serves as a processing pipeline for reconstructing camera poses and 3D scenes from multiple images. It consists of basic modules for Structure from Motion (feature detection/matching, minimal solvers) with a focus on building a robust and scalable reconstruction pipeline. It also integrates external sensor (e.g. GPS, accelerometer) measurements for geographical alignment and robustness. A JavaScript viewer is provided to preview the models and debug the pipeline.
Checkout this blog post with more demos
OpenSfM is BSD-style licensed, as found in the LICENSE file. See also the Facebook Open Source Terms of Use and Privacy Policy