This project is no longer maintained, please use the updated version: https://github.com/NJUVISION/PCGCv2 and our latest work: https://github.com/NJUVISION/SparsePCGC
Jianqiang Wang, Hao Zhu, Haojie Liu, Zhan Ma. [arXiv]
 (a)
(a)
 (b)
(b)
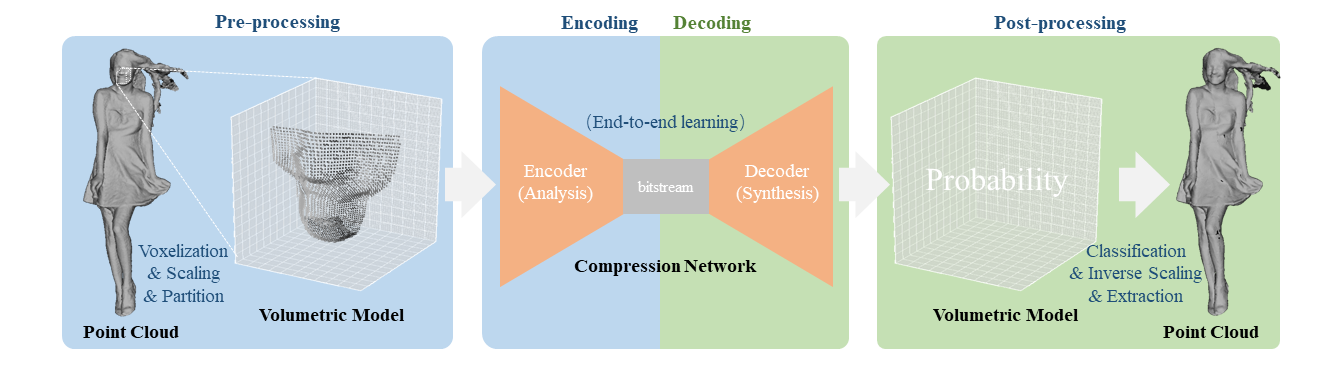
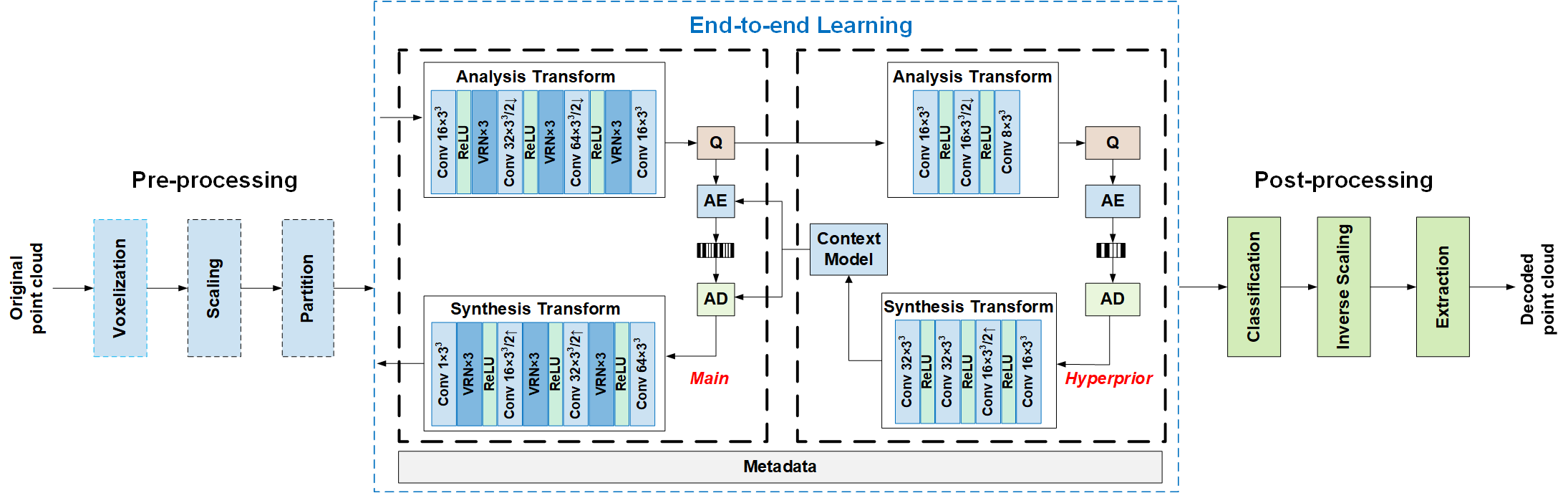
An illustrative overview in (a) and detailed diagram in (b) for point cloud geometry compression consisting of a pre-processing for PCG voxelization, scaling & partition, a compression network for compact PCG representation, and metadata signaling, and post-processing for PCG reconstruction and rendering. “Q” stands for “Quantization”, “AE” and “AD” are Arithmetic Encoder and Decoder respectively. “Conv” denotes the convolution layer with the number of the output, channels, and kernel size.
- ubuntu16.04
- python3
- tensorflow-gpu=1.13.1
- Pretrained models: https://box.nju.edu.cn/f/19f915f4be0643fc8862/
- ShapeNet Dataset: http://yun.nju.edu.cn/f/6d39b9cba0/
- Test data: https://box.nju.edu.cn/f/5ab2aa4dfd9941f5aaae/
python test.py compress "testdata/8iVFB/longdress_vox10_1300.ply" \
--ckpt_dir="checkpoints/hyper/a6b3/"python test.py decompress "compressed/longdress_vox10_1300" \
--ckpt_dir="checkpoints/hyper/a6b3/"Other default options: --scale=1, --cube_size=64, --rho=1.0, --mode='hyper', --modelname='models.model_voxception'
Please refer to demo.ipynb for each step.
python eval.py --input "testdata/8iVFB/longdress_vox10_1300.ply" \
--rootdir="results/hyper/" \
--cfgdir="results/hyper/8iVFB_vox10.ini" \
--res=1024Different parameters are required for different dataset, for example:
python eval.py --input "testdata/Sparse/House_without_roof_00057_vox12.ply" \
--rootdir "results/hyper/" \
--cfgdir "results/hyper/House_without_roof_00057_vox12.ini" \
--res=4096The detailed cfgs and results can be downloaded in https://box.nju.edu.cn/f/b78aeedc0453442aafe5/ And several examples of decoded point clouds can be download in https://box.nju.edu.cn/d/f6a6f8ae61c94cea9248/
sampling points from meshes, here we use pyntcloud (pip install pyntcloud)
cd dataprocess
python mesh2pc.pyThe output point clouds can be download in http://yun.nju.edu.cn/d/227493a5bd/
python generate_dataset.pythe output training dataset can be download in http://yun.nju.edu.cn/d/604927e275/
python train_hyper.py --alpha=0.75 \
--prefix='hyper_' --batch_size=8 --init_ckpt_dir='checkpoints/hyper/a0.75b3' --reset_optimizer=1or
python train_factorized.py --alpha=2 \
--prefix='voxception_' --batch_size=8 --init_ckpt_dir='./checkpoints/factorized/a2b3' --reset_optimizer=1results.ipynb
- 2021.01.01 the paper was published on TCSVT. (Wang, J., Zhu, H., Liu, H., & Ma, Z. (2021). Lossy Point Cloud Geometry Compression via End-to-End Learning. IEEE Transactions on Circuits and Systems for Video Technology, 31, 4909-4923.)
- 2020.10.03 open source.
- 2020.02.20 smbmit to TCSVT.
- 2019.11.14 submit to AVS PCC (continue to study in EE).
- 2019.10.09 submit to TIP. (rejected)
- 2019.04.29 submit to BMVC-2019. (rejected)
- Error on GPU: sometimes the point clouds may fail to decode correctly due to the randomness on GPU. You can test on CPU by setting os.environ['CUDA_VISIBLE_DEVICES']="" in "evel.py". Or encode and decode at the same time, see "compress_hyper" in "transform.py".
These files are provided by Nanjing University Vision Lab. Thanks for the help from SJTU Cooperative Medianet Innovation Center. Please contact us (wangjq@smail.nju.edu.cn) if you have any questions.