This is a collection of golang bindings for electronic components that are useful for robotics.

Blingbling.
See examples/led/main.go for usage.
Check if a button is pressed.
See examples/button/main.go for usage.
The motor is driven by a L293D is motor controller chip that gives the motor the commands to move forward or backward.
Use the 3 public methods to spin CW, CWW or stop:
SpinClockwize()
SpinCounterClockwize()
Stop()
The HC-SR04 is a pulse/echo based distance meter.
Utilising the Measure() method, it will return a float64 representing a distance in CM's.
The circuit for connecting the HC-SR04 to the pi is a bit tricky to build. Just search for a nice diagram online.
As reading the distance is done by a sound based sensor, the meter is a bit slow.
Moreover, the code uses time.sleep() to make sure that the sensor is ready for use.
Putting this sensor in a goroutine can be a good way to go. You can just keep polling the distance while not having your entire program idle through the process.
However, multiple sensors can interfere with each each other due to receiving each others echo's.
If you cycle through the sensors rather than trying to use them simultaneously then there will be no problem with incorrectly received echoes. They have a range of about 2m, so 4m (there and back) at 330m/s is 12ms. Allow double this for good measure, so check one sensor every 25ms.
See raspberrypi.org.
An accelerometer is a device that measures the acceleration in a specific direction from gravity and movement. The ADXL345 is a 3 axis accelerometer, basically it can measure acceleration in 3 directions simultaneously.
The code gives you methods to retreive G force, the Ms2 gravitational force and degrees of tilt and roll.
The speed/velocity/distance is a work in progress.
To use the measurements of the ADXL345 use the helper type Vector (adxlvector.go) which
has methods to retrieve usefull data such as the G force or a pitch and roll.
The pitch and roll actually depend on the way the accelerometer is placed. This function is written based on the normal position of a prototype board
See examples/accelerometer/main.go.
| Label | Description | Usage |
|---|---|---|
| 5V | Supply voltage 5V | unused |
| 3.3V | 3.3v | wired to 3.3v (pin 1) |
| GND | Ground | wired to Ground (pin 6) |
| SCL | Serial Communications Clock | wired to SCL (BCM 3) |
| SDA | Serial Data (I2C) | wired to SDA (BCM 2) |
| CS | Chip Select | wired to 3.3v |
| SDO | Ground | wired to Ground |
| INT1 | Interrupt 1 | unused |
| INT2 | Interrupt 2 | unused |
See the datasheet for additional information and possible settings of the ADXL345.
Go bindings for the 74HC595, a shiftregister that controls 8 pins.
See examples/shiftregister/main.go.
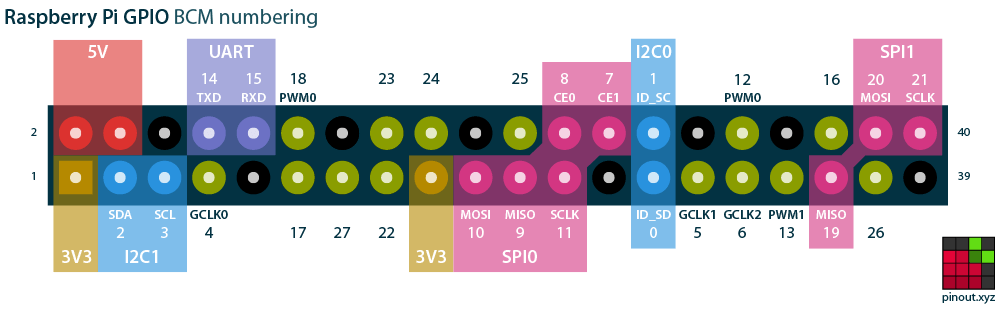
See pinout.xyz for a handy overview of the pin numbering of the Raspberry Pi.
{kind=link}
The ADXL345 is using the Go bindings for the SM bus from the
github.com/corrupt/go-smbus package which uses CGO.
For cross compiling, the CGO_ENABLED and CC args should be set in the build command.
For debian/linux it's something like:
env GOOS=linux GOARCH=arm GOARM=5 CC=arm-linux-gnueabi-gcc CGO_ENABLED=1 $(GOBUILD) -o $(BINARY_NAME) -v
The gcc-arm-linux-gnueabi is needed; the package is fount in apt (debian...):
sudo apt install gcc-arm-linux-gnueabi
See the makefile in the /examples/<component> directories.