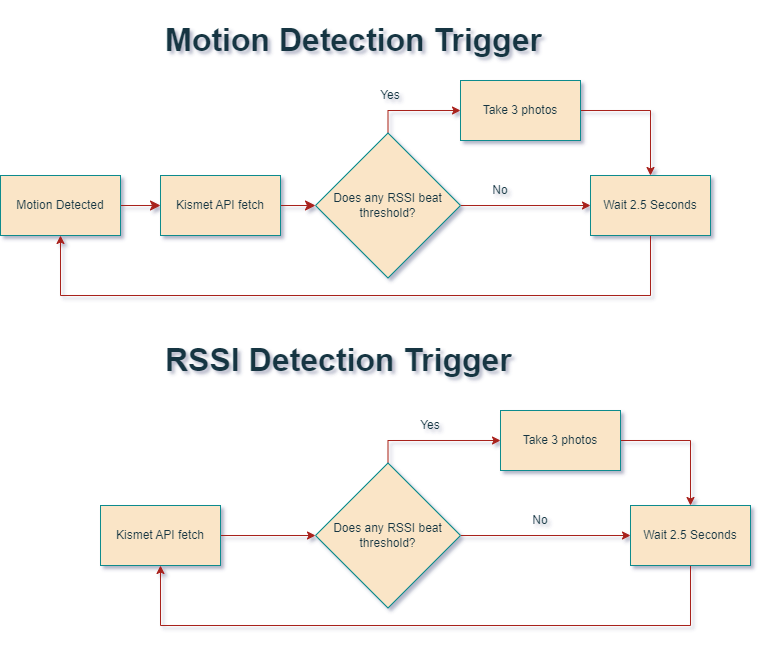
Kismet Camera Server is designed to be hosted on a remote device to take photos that could potentially correlate to MAC addresses based on user defined RSSI threshold. The trigger for the server to take a photo and perform an API call to the locally hosted Kismet Server is either by motion, detected by the camera, or by the existance of a strong RSSI that exceeds the user defined RSSI threshold.

MAC: 8EBF11199C15 at -71 RSSI (Thanks PB for the help)
- python3
- Kismet
git clone https://github.com/GrokkedBandwidth/kismet_camera_server.git
cd kismet_camera_server/
pip3 install -r requirements.txt
sudo apt update
sudo apt upgrade -y
sudo apt install -y build-essential cmake pkg-config libjpeg-dev libtiff5-dev libpng-dev libavcodec-dev libavformat-dev libswscale-dev libv4l-dev libxvidcore-dev libx264-dev libfontconfig1-dev libcairo2-dev libgdk-pixbuf2.0-dev libpango1.0-dev libgtk2.0-dev libgtk-3-dev libatlas-base-dev gfortran libhdf5-dev libhdf5-serial-dev libhdf5-103 libqt5gui5 libqt5webkit5 libqt5test5 python3-pyqt5 python3-dev libreadline-gplv2-dev libncursesw5-dev libssl-dev libsqlite3-dev tk-dev libgdbm-dev libc6-dev libbz2-dev libgtkmm-3.0-1 libnotify4 libcblas-dev libhdf5-dev libhdf5-serial-dev libatlas-base-dev libjasper-dev libqtgui4 libqt4-test libatlas-base-dev libhdf5-dev
sudo apt install -y libatlas-base-dev
pip3 install -U numpy
git clone https://github.com/GrokkedBandwidth/kismet_camera_server.git
cd kismet_camera_server/
pip3 install -r requirements.txt
Sometimes the dependency libatlas-base-dev will not install properly on first go. Thanks to Sam Westby Tech for figuring out how to get opencv working on Raspberry Pi. https://www.youtube.com/watch?v=QzVYnG-WaM4&ab_channel=SamWestbyTech
sudo apt update
sudo apt upgrade -y
sudo apt install -y build-essential cmake pkg-config libjpeg-dev libtiff5-dev libpng-dev libavcodec-dev libavformat-dev libswscale-dev libv4l-dev libxvidcore-dev libx264-dev libfontconfig1-dev libcairo2-dev libgdk-pixbuf2.0-dev libpango1.0-dev libgtk2.0-dev libgtk-3-dev libatlas-base-dev gfortran libhdf5-dev libhdf5-serial-dev libhdf5-103 libqt5gui5 libqt5webkit5 libqt5test5 python3-pyqt5 python3-dev libreadline-gplv2-dev libncursesw5-dev libssl-dev libsqlite3-dev tk-dev libgdbm-dev libc6-dev libbz2-dev libnotify4 libhdf5-dev libhdf5-serial-dev libatlas-base-dev libjasper-dev libatlas-base-dev libhdf5-dev
sudo rm -rf /usr/lib/python3.11/EXTERNALLY-MANAGED
git clone https://github.com/GrokkedBandwidth/kismet_camera_server.git
cd kismet_camera_server/
pip3 install -r requirements.txt
$ cd kismet_camera_server/
$ python3 main.py
To access the server once running navigate to:
http://127.0.0.1:5000
OR
http://<RemoteServerIP>:5000
Once parameters are set, hit 'Start Capture'
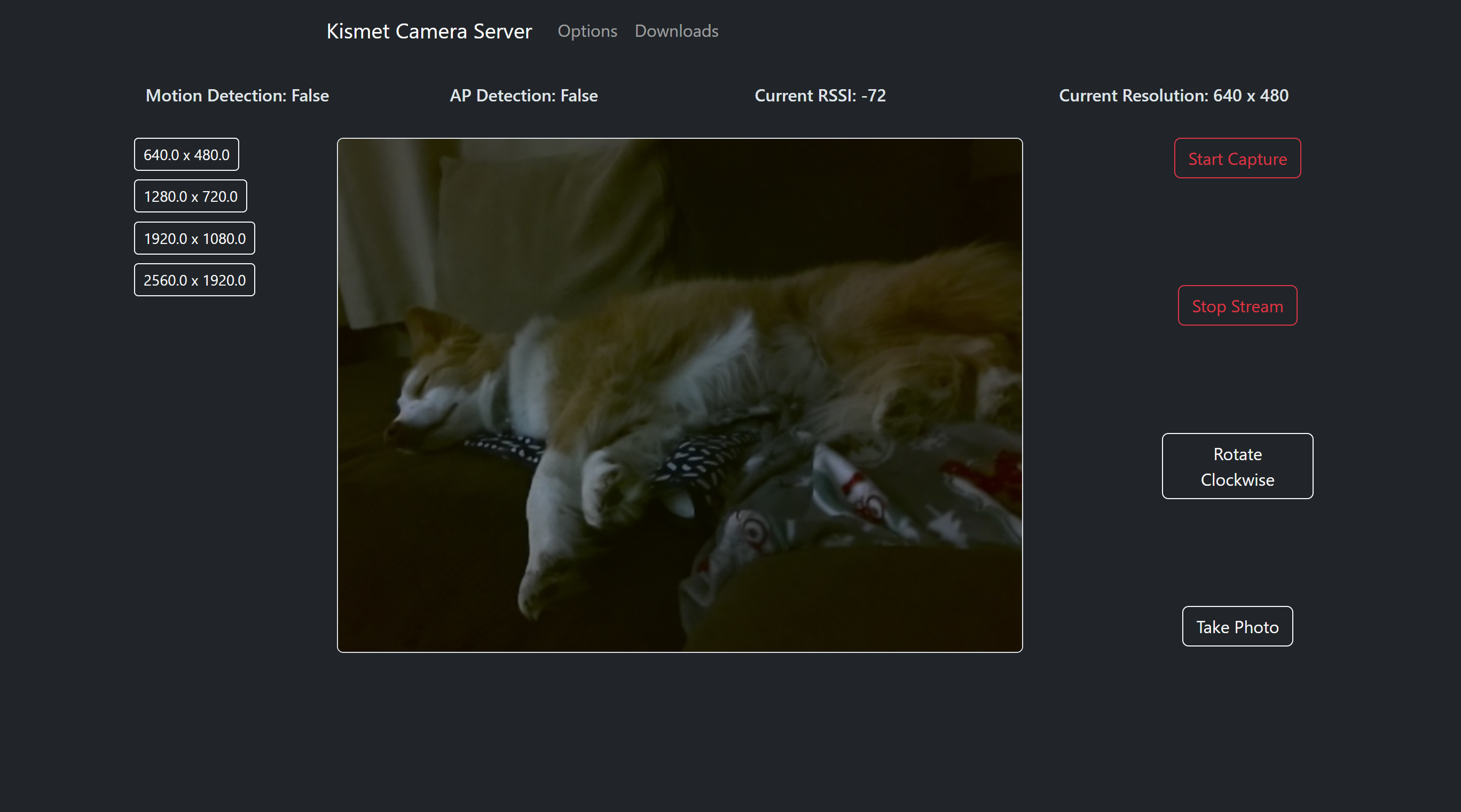
On the home page, there is a change resolution option that populates based on the camera that was selected in constants.py. The chosen resolution will only change the resolution of the photos taken and will not affect the resolution of the streamed footage. This is to save on the users bandwidth
This button controls whether kismet camera is 'running', meaning that if on, kismet camera will take photos and conduct API calls to Kismet. When off, kismet camera will not take photos.
This button controls the video feed to the webpage. This does not impact taking photos with kismet camera and is only implemented to save bandwidth for the user.
This button takes a photo of the current image in the video feed. This does not cause kismet camera to conduct an API call
In the resources folder is a file called ignore_list.csv. On boot of the server, this .csv is read and added to the cameras ignorelist. The camera will check this list and disregard any MACs seen within this list when checking RSSIs of nearby MACs. In the Ignore List tab, MACs can be added manually, or from a list of MACs that have been seen in this session. Each time the ignore list is modified from this tab, the camera will rebuild its ignore_list and the .csv will be updated.
Certain parameters, like motion detection or AP detection can be adjusted within the server itself, but other constants, like CAMERA and COUNT, need to be accessed in the camera.py. Below is a brief description of each constant and where it can be currently accessed:
This constant by default is set to True and can be adjusted in the server once running. If set to True, kismet camera will only take photos and perform an API call when motion is detected within the field of view of the camera. To prevent excessive API calls and photos, the time betweeon motion detection procs is 5 seconds. If set to False, the kismet camera will perform API calls to the local Kismet Server every 5 seconds and if a RSSI is seen that exceeds the RSSI threshold, the camera will take photos and the RSSIs that exceeded threshold will be recorded.
This constant by default is set to False and can be adjusted in the server once running. If set to True, AP RSSIs that exceed the RSSI threshold will also be recorded, along with other devices. If set to false, AP RSSIs will be ignored.
This constant is set to -72 default and can be adjusted in the server once running. Any signal meeting or exceeding this value will be recorded in the csv generated by the server.
These constants are defaulted to 'kismet', 'kismet', and 'localhost' respectively. Change these if you login information for kismet is different from the default or if the IP you are monitoring is different. The Username and Password can be adjusted within the server once running, but the IP will need to be adjusted in a text editor.
This constant is set to 3 by default and is currently not adjustable within the camera server. This constant designates how many photos will be taken per proc, whether is motion or RSSI based. There is a .5 second delay between each photo to take into consideration.
CAMERA designates which camera to use for the application. Observed behavior for a Surface Pro is below: 0: Front facing camera, if it exists 1: Back facing camera, if it exists 2: Additional cameras With this in mind, if a device, like a Raspberry Pi, does not have an onboard camera, the first camera added will be 0
START designates whether or not the application is actually 'capturing' meaning that it can be triggered to take photos and make API calls by either motion or RSSI detection. If set to True, application will start as soon as launched
STREAM determines whether the camera feed is live when the server is accessed. This constant does not impact capture meaning that even when STREAM is False, the camera server will behave as normal when capturing.
SENSITIVITY dictates the size of an object or distance of an object from the camera to trigger motion detection. This constant will need to be altered and tested before employment depending on the distance your target spot is from your sensor. A value of 10000 will set off motion detection when waving a hand in front of a webcam.
ROTATION is an integer variable that designates the rotation of the camera image as well as the images that are taken when the camera is triggered. Default is 0 and can be set to 0, 90, 180, and 270. Degrees are rotated clockwise.