Vision 是 iOS 上一个机器视觉的框架,它可以对图片和视频进行多种机器视觉相关的任务处理。Vision 里的人脸识别功能是最常用的功能之一,经过几次的迭代,它的识别效果已经很不错了,具体可以看看 WWDC2017 Session 506, WWDC2018 Session 716、717 和 WWDC 2019 Session 222,本文的 Demo-VisoinDetect 有些代码就是从这些 Session 中的示例代码修改而来。
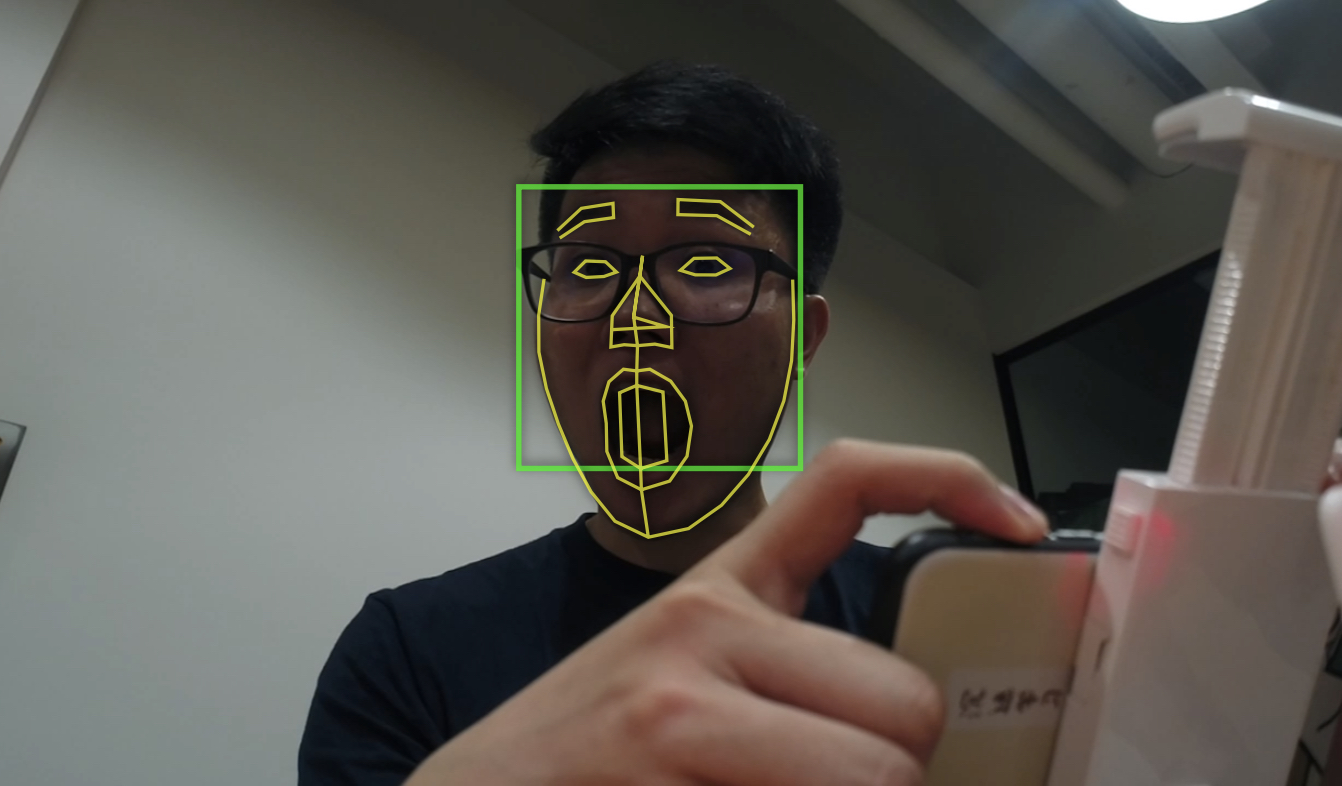
这里我们要做的东西是: 将 DJISDK 提供给我们的视频流数据,传入 Vision 框架进行人脸识别,然后拿到人脸信息在图传界面显示出来。效果如下:
相信大家对无人机App激活连接这部分已经比较熟悉了,这里就不赘述,不熟悉的话请查阅 DJISDK 文档
视频流数据其实就是一帧帧的图片,而 Vision 可以接收 CVPixelBuffer 的图片数据,所以我们需要把图传数据转换成 CVPixelBuffer 。
这里我们利用 DJIWidget 的 VideoFrameProcessor 来获取视频流的帧数据。
import DJISDK
import DJIWidget
@IBOutlet weak var videoPreview: UIView!
override func viewDidLoad() {
super.viewDidLoad()
DJIVideoPreviewer.instance().setView(videoPreview)
DJIVideoPreviewer.instance().enableHardwareDecode = true
DJIVideoPreviewer.instance().enableFastUpload = true
}
override func viewWillAppear(_ animated: Bool) {
super.viewWillAppear(animated)
DJIVideoPreviewer.instance().type = .autoAdapt
// 调用 registFrameProcessor 方法
DJIVideoPreviewer.instance()?.registFrameProcessor(self)
DJIVideoPreviewer.instance()?.start()
DJISDKManager.videoFeeder()?.primaryVideoFeed.add(self, with: nil)
}
override func viewWillDisappear(_ animated: Bool) {
super.viewWillDisappear(animated)
DJISDKManager.videoFeeder()?.primaryVideoFeed.remove(self)
DJIVideoPreviewer.instance().unSetView()
DJIVideoPreviewer.instance().close()
}上面是我们常规获取视频流的方法,不过我们还调用了 registFrameProcessor 的方法,调用了该方法后,我们需要实现 VideoFrameProcessor 的代理方法,从代理方法中可以获取到视频流的 VideoFrameYUV 数据。
// MARK: - VideoFrameProcessor
extension DJIVideoViewController: VideoFrameProcessor {
func videoProcessorEnabled() -> Bool {
return true
}
func videoProcessFrame(_ frame: UnsafeMutablePointer<VideoFrameYUV>!) {
let resolution = CGSize(width: CGFloat(frame.pointee.width), height: CGFloat(frame.pointee.height))
if frame.pointee.cv_pixelbuffer_fastupload != nil {
// 把 cv_pixelbuffer_fastupload 转换成 CVPixelBuffer 对象
let cvBuf = unsafeBitCast(frame.pointee.cv_pixelbuffer_fastupload, to: CVPixelBuffer.self)
setupCaptureDeviceResolution(resolution)
detectFace(pixelBuffer: cvBuf)
} else {
// 自行构建 CVPixelBuffer 对象
let pixelBuffer = frame.pointee.createPixelBuffer()
setupCaptureDeviceResolution(resolution)
guard let cvBuf = pixelBuffer else { return }
detectFace(pixelBuffer: cvBuf)
}
}
}在 func videoProcessFrame(_ frame: UnsafeMutablePointer<VideoFrameYUV>!) 的代理方法中,我们可以拿到 VideoFrameYUV 的数据。
理论上,在支持 HardwareDecode 的设备上,如果开启了 HardwareDecode 和 Fastupload , 返回的 VideoFrameYUV 里的 luma, chromaB and chromaR 可能会是空的(就无法构建 CVPixelBuffer),这时候可以通过 cv_pixelbuffer_fastupload 获取到 CVPixelBuffer 的值。所以上面的代码里先判断 frame.pointee.cv_pixelbuffer_fastupload 是否不为 nil。
如果 cv_pixelbuffer_fastupload 为 nil 则我们需要自行构建 CVPixelBuffer,这里我们给 VideoFrameYUV 添加了一个扩展方法 createPixelBuffer() 以构建 CVPixelBuffer,这里就不贴代码了,具体可以查看 Github 上的源码。
针对开启 HardwareDecode 获取到 cv_pixelbuffer_fastupload 的情况,目前我手头上的设备是无法获取得到,总是需要进行构建 CVPixelBuffer。这个问题在 DJIWidget Github issue9 有相关的讨论。
Vision 对数据的处理逻辑可以分为三步:
| 做什么 | 怎么做 | 处理结果 |
|---|---|---|
| VNRequest | VNImageRequestHandler VNSequenceRequestHandler |
VNObservation |
为了识别人脸及其五官信息,我们需要创建 VNDetectFaceLandmarksRequest。
let detectFaceRequest = VNDetectFaceLandmarksRequest(completionHandler: detectedFace)因为我们需要处理视频流的一帧帧图片数据,所以我们用 VNSequenceRequestHandler 来执行 FaceLandmarksRequest。
do {
// 注意无人机图传中照片都是 downMirrored 的,即(0, 0)在左下角
try sequenceRequestHandler.perform([detectFaceRequest], on: pixelBuffer, orientation: .downMirrored)
} catch {
print("----执行 sequenceRequestHandler 失败: \(error.localizedDescription)")
}调用 perform 方法时,除了传入要执行的 request 和 pixelBuffer 外,还需要注意传入图片的 Orientation 信息,以让 Vision 知道这个图片是倒着的还是反转的等等。因为我们的视频流是从无人机传过来的,这里测试发现都是 downMirrored 的,即照片的 (0, 0) 点在左下角。
最终得到的结果是封装在 VNFaceObservation 的对象里的,通过该对象可以拿到人脸相对于图片的坐标:boundingBox 以及五官的坐标信息 landmarks,从而可以绘制在图传界面上。具体绘制方法 drawFaceObservations 可以在 Github 上查看。
func detectedFace(request: VNRequest, error: Error?) {
if let error = error {
print("---detectedFaceRequest Error: \(error.localizedDescription)")
return
}
guard let results = request.results as? [VNFaceObservation] else { return }
DispatchQueue.main.async {
self.drawFaceObservations(results)
}
}
这里的关键点是在于:如何从无人机图传视频流里拿到 CVPixelBuffer ———— 这个 Vision 可以接受的数据。
另外一个的关键点是如何在图传界面上绘制出人脸信息,这里涉及到如何获取到视频图片的真实大小(Pixel单位)、ordination 等。
一旦处理好这些关键点,其余的问题就迎刃而解了。
欢迎关注我的公众号:HansonTalk

{kind=link}
{kind=link}