{kind=link}
armhf-RPi docker image of Fr24feed, FlightAware, RadarBox and dump1090.
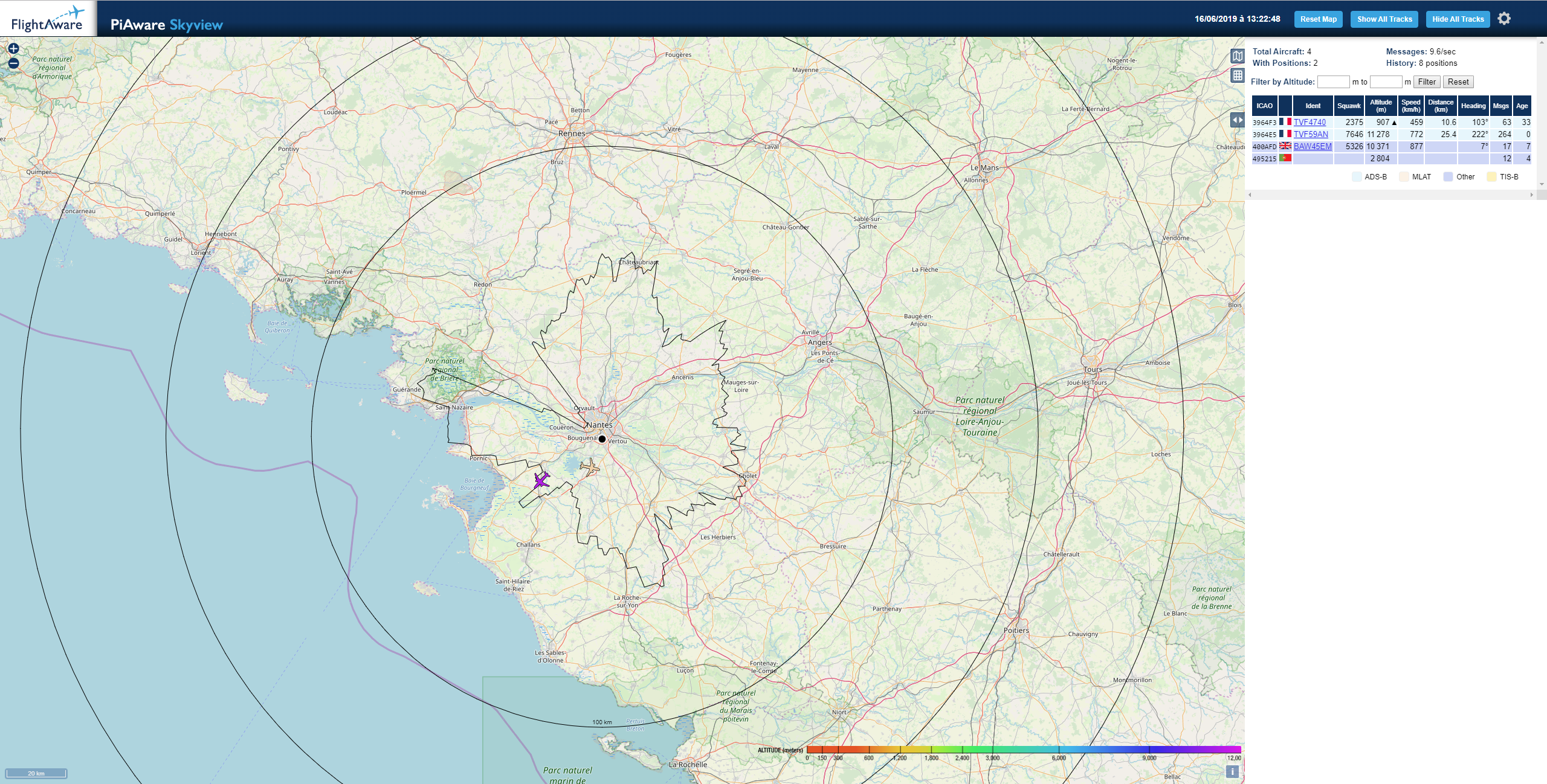
Feed FlightRadar24, FlightAware and RadarBox services and allow you to see the positions of aircrafts on a map.
- Raspberry Pi with Raspbian (tested with V4 Model B)
- Docker
- RTL-SDR DVBT USB Dongle (RTL2832)
Run :
docker run -d -p 8080:8080 -p 8754:8754 \
--device=/dev/bus/usb:/dev/bus/usb \
-e "FR24FEED_FR24KEY=MY_SHARING_KEY" \
-e "PIAWARE_FEEDER_DASH_ID=MY_FEEDER_ID" \
-e "RBFEEDER_KEY=MY_SHARING_KEY" \
-e "HTML_SITE_LAT=MY_SITE_LAT" \
-e "HTML_SITE_LON=MY_SITE_LON" \
-e "HTML_SITE_NAME=MY_SITE_NAME" \
-e "PANORAMA_ID=MY_PANORAMA_ID" \
thomasreiser/flightfeeder
Go to http://dockerhost:8080 to view a map of reveived data. Go to http://dockerhost:8754 to view fr24feed configuration panel.
Note : remove -e "PANORAMA_ID=MY_PANORAMA_ID" from the command line if you don't want to use this feature.
To disable starting a service you can add an environment variable :
| Environment Variable | Value | Description |
|---|---|---|
SERVICE_ENABLE_DUMP1090 |
false |
Disable dump1090 service |
SERVICE_ENABLE_PIAWARE |
false |
Disable piaware service |
SERVICE_ENABLE_FR24FEED |
false |
Disable fr24feed service |
SERVICE_ENABLE_RBFEEDER |
false |
Disable rbfeeder service |
SERVICE_ENABLE_HTTP |
false |
Disable http service |
Ex : -e "SERVICE_ENABLE_HTTP=false"
Register on https://flightaware.com/account/join/.
Run :
docker run -it --rm \
-e "SERVICE_ENABLE_DUMP1090=false" \
-e "SERVICE_ENABLE_HTTP=false" \
-e "SERVICE_ENABLE_FR24FEED=false" \
-e "SERVICE_ENABLE_RBFEEDER=false" \
thomasreiser/flightfeeder /bin/bash
When the container starts you should see the feeder id, note it. Wait 5 minutes and you should see a new receiver at https://fr.flightaware.com/adsb/piaware/claim (use the same IP as your docker host), claim it and exit the container.
Add the environment variable PIAWARE_FEEDER_DASH_ID with your feeder id.
| Environment Variable | Configuration property | Default value |
|---|---|---|
PIAWARE_FEEDER_DASH_ID |
feeder-id |
YOUR_FEEDER_ID |
Ex : -e "PIAWARE_RECEIVER_DASH_TYPE=other"
Run :
docker run -it --rm \
-e "SERVICE_ENABLE_DUMP1090=false" \
-e "SERVICE_ENABLE_HTTP=false" \
-e "SERVICE_ENABLE_PIAWARE=false" \
-e "SERVICE_ENABLE_FR24FEED=false" \
-e "SERVICE_ENABLE_RBFEEDER=false" \
thomasreiser/flightfeeder /bin/bash
Then : /opt/fr24feed/bin/fr24feed --signup and follow the instructions, for technical steps, your answer doesn't matter we just need the sharing key at the end.
Finally to see the sharing key run cat /etc/fr24feed.ini, you can now exit the container.
Add the environment variable FR24FEED_FR24KEY with your sharing key.
| Environment Variable | Configuration property | Default value |
|---|---|---|
FR24FEED_FR24KEY |
fr24key |
YOUR_KEY_HERE |
Ex : -e "FR24FEED_FR24KEY=0123456789"
Run :
docker run -it --rm \
-e "SERVICE_ENABLE_DUMP1090=false" \
-e "SERVICE_ENABLE_HTTP=false" \
-e "SERVICE_ENABLE_PIAWARE=false" \
-e "SERVICE_ENABLE_FR24FEED=false" \
-e "SERVICE_ENABLE_RBFEEDER=false" \
thomasreiser/flightfeeder /bin/bash
Then : /opt/rbfeeder/bin/rbfeeder to do an initial startup which will also create a new key for you. Use this key then to claim this station in your RadarBox account at https://www.radarbox.com/raspberry-pi/claim.
Add the environment variable RBFEEDER_KEY with your sharing key.
| Environment Variable | Configuration property | Default value |
|---|---|---|
RBFEEDER_KEY |
[client] -> key |
`` |
Ex : -e "RBFEEDER_KEY=0123456789"
If you don't need this feature ignore this.
Create a panorama for your receiver location on http://www.heywhatsthat.com.
| Environment Variable | Default value | Description |
|---|---|---|
PANORAMA_ID |
Panorama id | |
PANORAMA_ALTS |
1000,10000 |
Comma seperated list of altitudes in meter |
Note : the panorama id value correspond to the URL at the top of the panorama http://www.heywhatsthat.com/?view=XXXX, altitudes are in meters, you can specify a list of altitudes.
Ex : -e "PANORAMA_ID=FRUXK2G7"
If you don't want to download the limit every time you bring up the container you can download http://www.heywhatsthat.com/api/upintheair.json?id=${PANORAMA_ID}&refraction=0.25&alts=${PANORAMA_ALTS} as upintheair.json and mount it in /usr/lib/fr24/public_html/upintheair.json.
Clone this repository into your Raspberry Pi.
docker build .