This application serves a websocket that runs a dramatically simplified version of the Buttplug Sex Device Control Standard protocol. This allows commands to be sent to devices with significantly less programming, making integration feasible in more restricted environments where the buttplug.io protocol is difficult or impossible to implement.
- Download the latest release.
- Run buttplug-lite-windows.exe (or your operating system's appropriate binary if you aren't on Windows. Builds are also provided for macOS and Linux.)
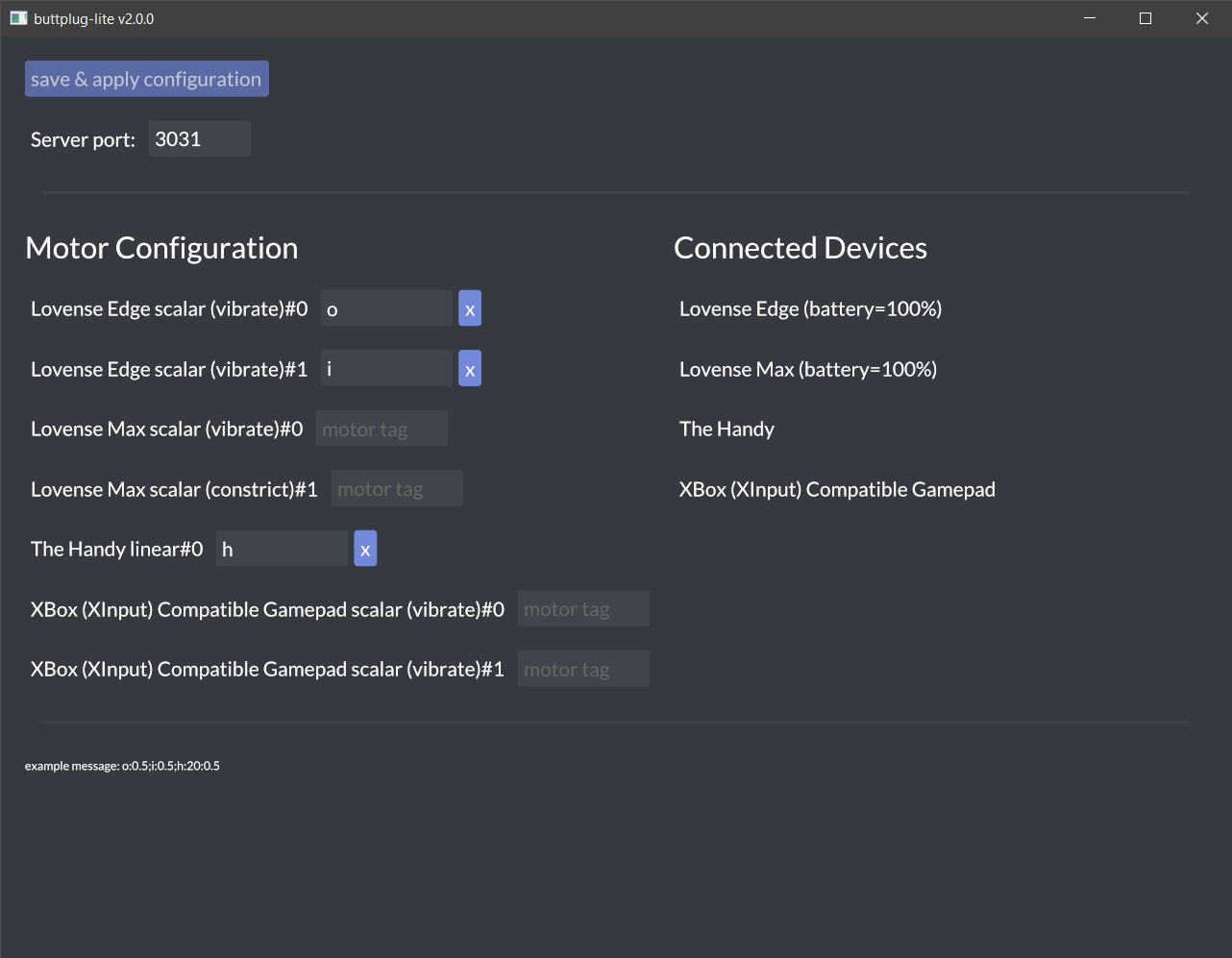
- Add tags for the devices you plan to use.
- Press "apply configuration" to save your settings and apply them to the current server.
- Extremely simple fire-and-forget protocol
- Standalone application requiring no other software
All buttplug.io supported devices should work. This includes everything from Lovense devices to Xbox controllers.
- Install Rust
- Clone the project
cargo build --release
A Logix reference implementation is available in this public folder:
neosrec:///U-runtime/R-1d65fb20-ab7b-46c1-89eb-90d176309ec2 (paste that link in-game to spawn it).
Below is a screenshot of the reference implementation.
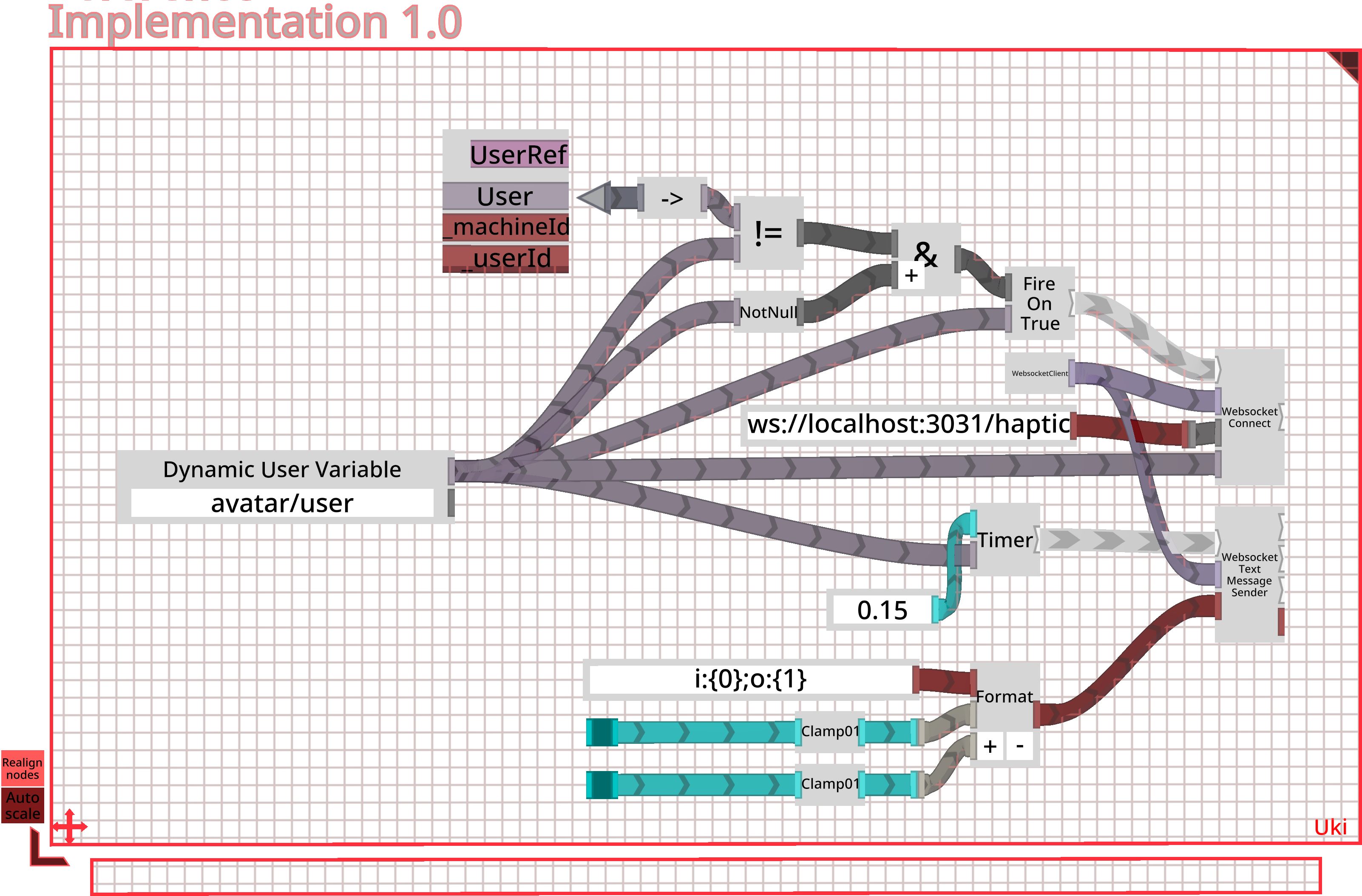
This implementation is designed to go on an avatar. The avatar/user input should contain the user currently in the avatar. This could be sourced from an AvatarUserReferenceAssigner or a Get Active User. The top half of the Logix handles resetting the websocket connection when a new user enters the avatar, and can be omitted if the avatar will only ever be used by one user. The lower half of the logix sends updates to the buttplug-lite server at around 7 Hz. If you go too far beyond 7 Hz you may start to run into latency issues. The two float inputs should be between zero and one (inclusive) and represent the desired motor intensity. You could source this from any number of places, such as Nearest User Hand, VirtualHapticPointSampler, or even a simple UI slider.
Send text-type messages to ws://127.0.0.1:3031/haptic. Binary-type messages are not currently supported. Commands should be sent at most at a 10hz rate. Beyond that application performance may begin to degrade.
The message format is a list of semicolon (;) delimited motor commands. There are three possible types of command: Scalar, Linear, and Rotation. All commands start with a motor tag, which is a user-defined string representing a specific motor on a specific device.
tag:strength
Strength controls motor intensity and ranges from 0.0 to 1.0.
tag:duration:position
Position controls target position and ranges from 0.0 to 1.0.
Duration controls time in milliseconds the device should take to move to the target position. Duration must be a positive integer.
tag:speed
Speed controls the speed of rotation and ranges from -1.0 to 1.0. Positive numbers are clockwise, negative numbers are counterclockwise.
tag:level
Only supported in versions 0.5.3 to 1.1.0. Starting in version 2, contraction is handled via a scalar command.
Contraction controls the pump strength on the Lovense Max. It must be an integer between 0 and 3, inclusive.
| Tag | Type | Strength | Duration | Position | Speed | Contraction |
|---|---|---|---|---|---|---|
| foo | Scalar | 0% | ||||
| bar | Scalar | 30% | ||||
| baz | Scalar | 100% | ||||
| gort | Linear | 20ms | 25% | |||
| klaatu | Linear | 400ms | 75% | |||
| barada | Rotation | -0.75 | ||||
| nikto | Rotation | 0.26 |
foo:0;bar:0.3;baz:1;gort:20:0.25;klaatu:400:0.75;barada:-0.75;nikto:0.26
Note that you are not required to specify all the tagged motors if you don't want to. The following is also valid, but will of course only drive the foo motor.
foo:0.1
Motors will continue running at the vibration and rotation speeds last commanded until another update is received.
If no command is received for 10 seconds, buttplug-lite will send a stop command to all connected devices. To avoid this, send commands periodically even if your desired motor state has not changed.
Send an HTTP GET to http://127.0.0.1:3031/. A 200 OK will be returned with body containing the application name and version. Example response:
buttplug-lite 0.7.0
Prior to version 0.7.0 this endpoint is a 404.
Send an HTTP GET to http://127.0.0.1:3031/deviceconfig. A 200 OK will be returned with body containing a machine-readable list of configured motors. Example response:
o;Lovense Edge;scalar
c;Lovense Max;scalar
i;Lovense Edge;scalar
m;Lovense Max;scalar
The response is a newline (LF) delimited list of motor configurations. There is a trailing newline. Each motor configuration line is a semicolon (;) delimited list of tag, device name, and motor type. In the case where there are no configured motors the response body will be an empty string.
Possible motors types are: linear, rotation, and scalar.
Prior to version 0.7.0 this endpoint is a 404.
Send an HTTP GET to http://127.0.0.1:3031/hapticstatus. A 200 OK will be returned with body containing a plain text summary of the connection status and connected devices. This response is intended for debugging and is not intended to be parsed. The response structure is subject to change. If you have a use case that requires parsing device status let me know by opening an issue.
Example response:
device server running=true
Lovense Edge
ScalarCmd: ClientGenericDeviceMessageAttributes { feature_descriptor: "No description available for feature", _actuator_type: Vibrate, step_count: 20 }
ScalarCmd: ClientGenericDeviceMessageAttributes { feature_descriptor: "No description available for feature", _actuator_type: Vibrate, step_count: 20 }
Lovense Hush
ScalarCmd: ClientGenericDeviceMessageAttributes { feature_descriptor: "No description available for feature", _actuator_type: Vibrate, step_count: 20 }
Lovense Max
ScalarCmd: ClientGenericDeviceMessageAttributes { feature_descriptor: "Vibrator", _actuator_type: Vibrate, step_count: 20 }
ScalarCmd: ClientGenericDeviceMessageAttributes { feature_descriptor: "Air Pump", _actuator_type: Constrict, step_count: 5 }
The Handy
LinearCmd: ClientGenericDeviceMessageAttributes { feature_descriptor: "No description available for feature", _actuator_type: Position, step_count: 100 }
Send an HTTP GET to http://127.0.0.1:3031/batterystatus. A 200 OK will be returned with body containing a plain text list of devices and battery levels. Devices are delimited by newlines, battery levels are delimited by :. If the device has an unknown battery level a -1 will be returned. Example:
Lovense Edge:1
Lovense Max:0.45
buttplug-lite is intended to be used as a GUI, but for debugging purposes a few command-line arguments are included.
Usage: buttplug-lite [OPTIONS]
Options:
-v, --verbose... Sets the level of verbosity. Repeating this argument up to four times will apply increasingly verbose log_filter presets
-c, --stdout Log to stdout instead of the default log file
-f, --log-filter <LOG_FILTER> Custom logging filter: https://docs.rs/tracing-subscriber/0.3.16/tracing_subscriber/filter/struct.EnvFilter.html. This completely overrides the `--verbose` setting
--self-check Run self-checks then immediately exit. This is for internal use and not designed for end users
--debug-ticks <SECONDS> Emit periodic ApplicationStatusEvent ticks every <SECONDS> seconds. These "ticks" force the UI to update device state, which for example can be used to poll device battery levels
--no-panic-handler Disables the custom panic handler in the log file. Has no effect if used with `--stdout`
--force-panic-handler Enables the custom panic handler in stdout logs. Has no effect if file logging is used. Note that file logging is the default without an explicit `--stdout`
-h, --help Print help
-V, --version Print version
Here is where buttplug lite stores its various files on your filesystem:
| Windows | macOS | *nix | |
|---|---|---|---|
| Configuration Directory | %APPDATA%\runtime-shady-backroom\buttplug-lite\config |
$HOME/Library/Application Support/io.github.runtime-shady-backroom.buttplug-lite |
$XDG_CONFIG_HOME/buttplug-lite or $HOME/.config/buttplug-lite |
| Log Directory | %APPDATA%\runtime-shady-backroom\buttplug-lite\data\logs |
$HOME/Library/Application Support/io.github.runtime-shady-backroom.buttplug-lite/logs |
$XDG_DATA_HOME/buttplug-lite/logs or $HOME/.local/share/buttplug-lite/logs |
Note that once a maximum of 50 log files are reached, old logs will be rotated out.
If you have bugs to report or ideas to suggest please let me know by opening an issue or starting a discussion.
Copyright 2022-2023 runtime-shady-backroom and buttplug-lite contributors.
Buttplug Lite is provided under the AGPL-3.0 license.