To make RCJ Soccer SuperTeam games more manageable for referees and to bring a simple and robust way of robot to robot / robot to referee communication, we would like to introduce these modules. This module does not count to the weight limit.
The required way to power these modules is to connect GND to the negative (-) of your battery and BAT+ to the positive (+) of your battery without having any kind of switch between those connections when battery voltage is between 5.3 V and 25V.
If your battery voltage is not between 5.3 V and 25V or there is some engineering reason why the first option is not realistic, you can use a 3V3 pin to provide 3.3V. The module must be able to draw at least 500mA at all times. This module needs to be powered at all times during the match, even when the robot is not on the field (out of bounds, damage), in order to be able to keep a stable communication connection.
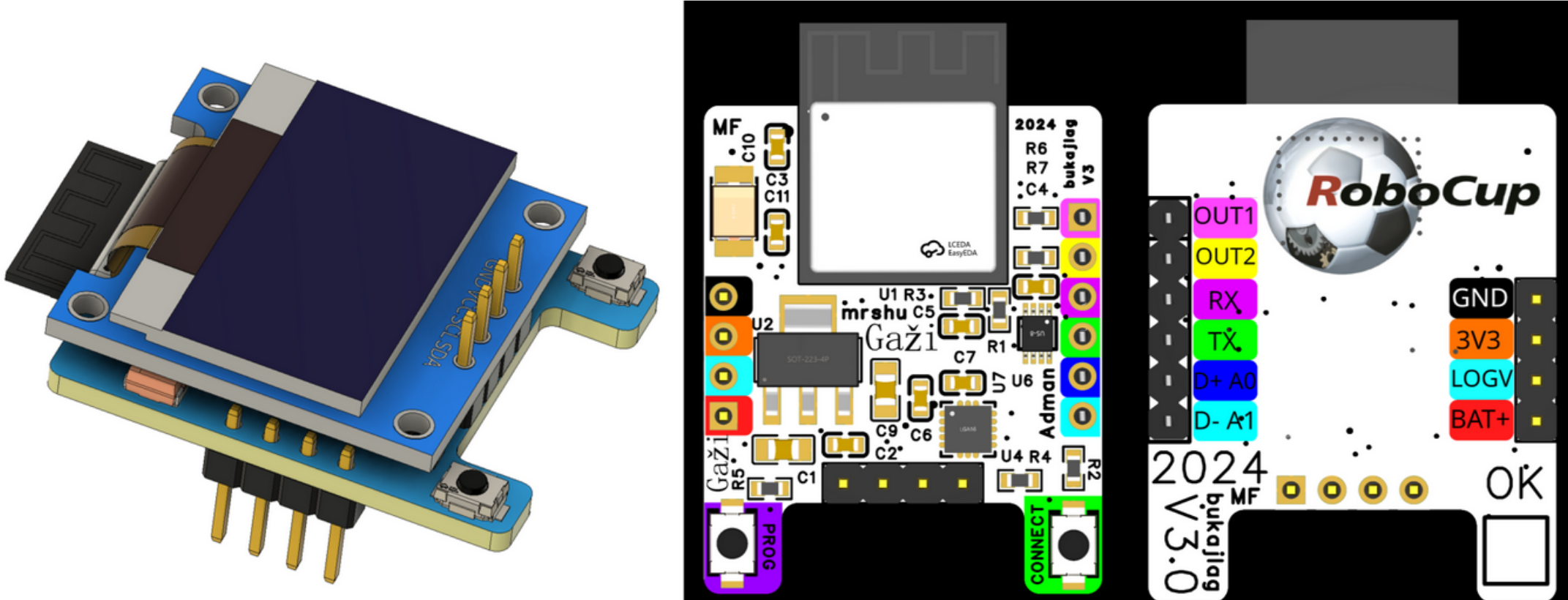
To get start/stop information one can easily read from pins OUT1 or OUT2 where 3.3V = GO and 0V = STOP. The robot is required to respond to this stop/go information at all times for the duration of the game.
You can use RX, TX for wireless communication between robots using UART. Voltage of UART logic can be chosen using LOGV pin by connecting required voltage (3.3V - 5.5 V). Default voltage is 3.3V. You can also choose a communication channel by using A0,A1 pins. Overall, 4 channels are available (00, 01, 10, 11). Those pins can accept both 3.3V and 5V logic voltag
The module is equipped with a display that shows a countdown for the duration of the Robot’s penalty. Teams are allowed to put robots back in the game according to rules when penalty time’s up on the display.
If you have problems or questions you can look into and if nobody has posted your problem yet open a GitHub issue, post on the forum or ask on the RoboCupJunior Discord server
- The main change is in using ESP32C6 = improved connectivity/less interference
- Using OLED display = time down counter for penalization time / connection / future proof
- D+,D- used for 2 things
- uploading program easily => firmware updates at home
- choosing communication canal in super team 00,01,10,11 = strategy in super team with communication finally possible
- Using giro/accelerometer = able to measure robot speed, future proof, collision detection (0.25 cents for ocean of possibilities )
- Power would be able to be provided directly from battery (up to 25V ) = no disconnecting during matches
- Also we will provide simple PCBs acting as hubs so easier testing / connecting modules for everyone
- Multicolour print, pinout = cool, easier pinout reading, fewer damaged modules, higher coolness level (it is cheap, don't worry)
- During competition: everyone will be required to go to technical control of the module before the actual games, hence better games
- Make adapter hub for ev3/spike
- Adding more libraries with footprint/schematic/3D for Altium, Eagle, KiKad, EasyEDA, OrcaCAD and more ...
- Reporting errors/testing