{kind=link}
{kind=link}
{kind=link}
Name: Group 10

- Following wall
- Turn left
- Obstacle avoidance
- Obstacle detection
- Run through automatic door
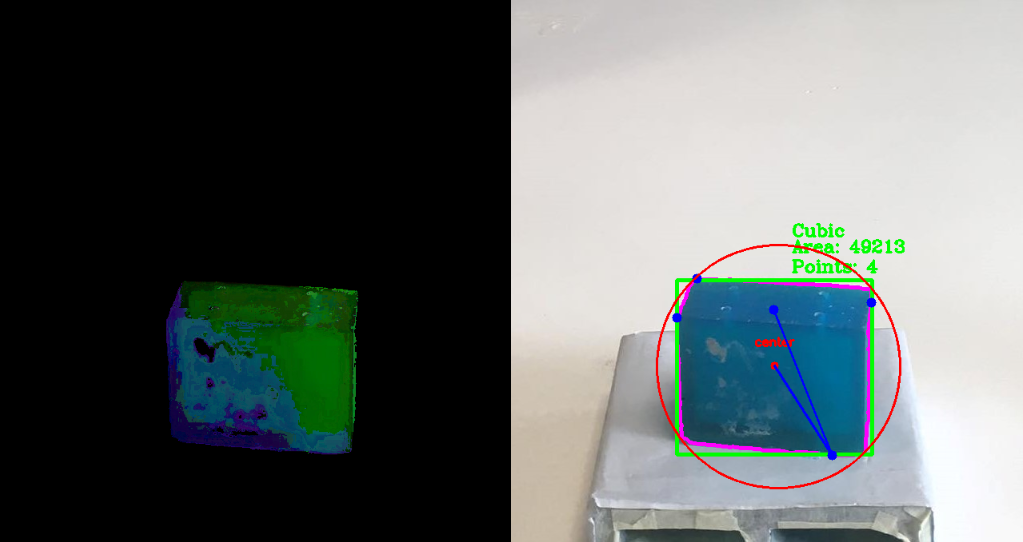
- Object detection using openCV
- Using keyboard
rto start the robot - Using keyboard
mto switch to manual stage - Using keyboard
wto move up - Using keyboard
ato turn left - Using keyboard
dto turn right - Using keyboard
sto move down - Using keyboard
oto lift the forklift - Using keyboard
pto lift the forklift
Cubic
Cylinder

Linux terminal:
- Jump to the directory of app.py
- Type: sudo python3 app.py
- Then go to the IP of your raspberry Pi then type in the address of your web browser:
<Raspberry PI>/home
This project uses HTTP as the connection protocol, in which, REST API is deployed into the project. However, for the real-time communication, it is not advisable to use this method. For the real-time communication between getting data from the hardware side, WebSocket should be considered instead. Moreover, for a smooth and fast signal for the video streaming, UDP is more favourable than WebSocket. Maybe a hybrid-approach(WebSocket for the real-time data update and UDP for the Video Streaming) would be better. Futhermore, React.js should be more considered for the response of the UI update, therefore, the HTML page does not have to set the interval to update which is a poor practice.