GP Discrete Time State Space Models #15
Comments
|
Hi there, I think the file gp_nmpc_cstr_output_feedback.py from the example repository contains what you are looking for. At the moment you can set the dynamical equations as Hope this helps you. |
|
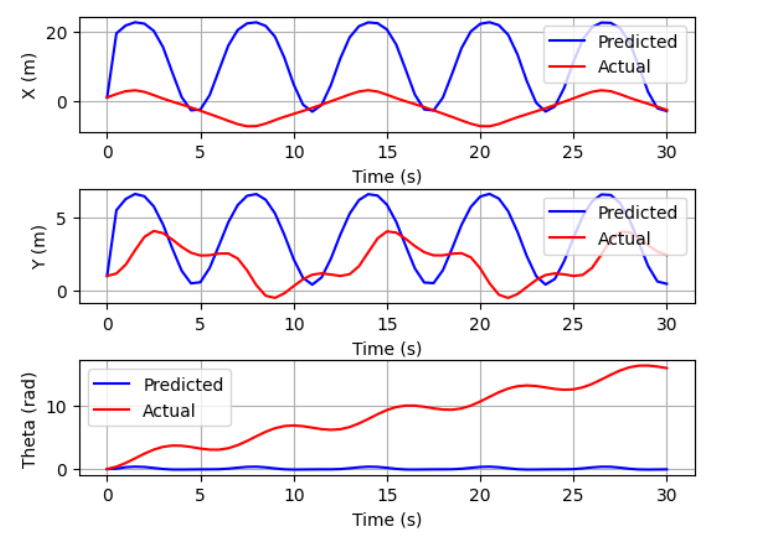
@jpohlodek Thank you for your response. I had referred to the example you pointed out and that was how I had setup initially. But the results I get from simulating the model don't seem to be correct. Because when I predict using: gp_1_mean, _ = gp1.predict(train_in) I get the following results:
But when I formulate a model using GPs as you've shown and simulate the model as shown below, the results are different and not consistent with what the gaussian processes should have predicted with the same time step.
The code can be found here |

|
Hi @sumedhs-1995, sorry for the late reply. Looking over your code, I found one problem where you generate your features and labels. You create the labels by downsampling the state solution and applying the shift afterwards. Hence, you train the features of one time step (t) with the labels from 50 time steps (t+50) later. In other words you are predicting with a step size of 50, but in the prediction you want a step size of 1. In order to run it in a closed loop with the same sampling time as the original system, you need the labels from the next time (t+1) step. So it's better to create the labels first by shifting the state solution and then downsample to the desired size of the training data set. |
@brunomorampc I am trying to use a GP Model in an MPC setting where I am trying to write the state-space equations as
x1(t+1) = gp1(x(t), u(t))
x2(t+1) = gp2(x(t),u(t)),
where x = [x1;x2], u = [u1;u2]
I have currently written code as follows. However I am still stuck at writing the correct syntax for writing gp into the equation. I would really appreciate some help with this.
Thank you in advance!
Create GP Prediction Model
gp_model = Model(plot_backend='bokeh', name='GP_Model', discrete=True)
Set states and inputs
s = gp_model.set_dynamical_states(['x1','x2'])
u = gp_model.set_inputs(['u1','u2'])
gp_model.set_measurement_equations([s[0], s[1]])
x1 = s[0]
x2 = s[1]
u1 = u[0]
u2 = u[1]
x_next = gp1.predict([x1,x2,u1,u2])
y_next = gp2.predict([x1,x2,u1,u2])
gp_model.set_dynamical_equations(['x1', 'x2' ])
Set up the model
gp_model.setup(dt=0.01)
Set initial conditions
x0_GP = [1, 1]
gp_model.set_initial_conditions(x0=x0_GP)
The text was updated successfully, but these errors were encountered: