Added: Modified fetch robot xml #21
Conversation
|
I am not sure if this is just how pybullet allows the robot to move however after several steps I get: I am looking at the current ways the environments are setup and they involve applying the action, doing a global step, then determing which joints are outside of their limits. Obviously this is not a big deal for RL, but if I want to test a regular planner, it needs to know that an action is going to be invalid preferably before executing that action (both due to self limits, but also environment collisions). Are there any implimentations of this that I can reference? I'm not an expert in gym environments (but getting this fetch to spawn actually helped me a lot in terms of understanding how to make and test gym envs) so I might not be super familier if there are already some that do action validation. |


|
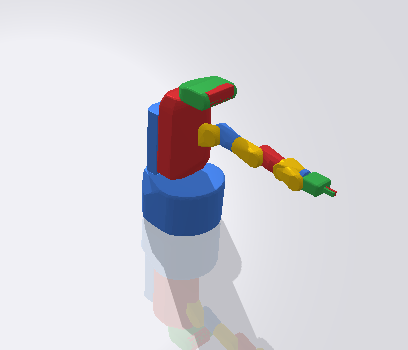
Also, I am currently working on the URDF version of fetch, which is showing more promise: Both models demonstrate collisions. Which I understand is kind of moving farther from the Mujoco simulation, however the bullet Mujoco format support just does not seem to be there. So at best, the model with look ugly. |

|
Hi there! Thanks for working on this. The mujoco support should be made to
work by reporting the problems to pybullet (bullet3 repo). We should check
what joint is the problem and why. Using URDF is a workaround in my
opinion, but not a solution.
Furthermore, we should ask Erwin to somehow skip unimplemented declarations
(such as the camera tag you had to comment).
…On Sun, Jan 27, 2019, 23:49 josiahls ***@***.***> wrote:
Also, I am currently working on the URDF version of fetch, which is
showing more promise:
[image: image]
<https://user-images.githubusercontent.com/19930483/51807977-af4df180-225b-11e9-92c3-90ad38e563a8.png>
Both models demonstrate collisions.
Which I understand is kind of moving farther from the Mujoco simulation,
however the bullet Mujoco format support just does not seem to be there. So
at best, the model with look ugly.
—
You are receiving this because you are subscribed to this thread.
Reply to this email directly, view it on GitHub
<#21 (comment)>,
or mute the thread
<https://github.com/notifications/unsubscribe-auth/AC97q5GxDD5MJ0ZyTYRGYBsJ0_s9l8A_ks5vHi0OgaJpZM4aUcW7>
.
|
|
I am just about to look into your fetch robot to see what might be wrong with it. If in doubt how to implement a proper env for pybullet-gym check out the reacher_env.py (it is a manipulator as fetch probably is): |
|
Thanks, let me know if the gripper is just supposed to be that way. The
reacher has a Boolean keyword called limited that is set to true. Does that
have anything to do with problem? The reacher env does not have any code
related to checking actions before taking them.
Also, for both the URDF and the xml, the colors do not register. Like the
URDF is a weird blue tint, and the xml has different colors.
One main reason why I switched over to URDF was because of the difficulty I
had converting the xml Mujoco pick-and-place environment. Both table and
the block were the same white color and the sphere goal seemed invisible.
It seems the color tags do not register. Also I joined the slack, and am
accessable through it.
…On Mon, Jan 28, 2019, 11:39 AM Benjamin Ellenberger < ***@***.*** wrote:
I am just about to look into your fetch robot to see what might be wrong
with it.
If in doubt how to implement a proper env for pybullet-gym check out the
reacher_env.py (it is a manipulator as fetch probably is):
https://github.com/benelot/pybullet-gym/blob/master/pybulletgym/envs/roboschool/envs/manipulation/reacher_env.py
—
You are receiving this because you authored the thread.
Reply to this email directly, view it on GitHub
<#21 (comment)>,
or mute the thread
<https://github.com/notifications/unsubscribe-auth/ATAdc6EiCh4ZfCCjv7QVdY84CB_6HOn7ks5vHye2gaJpZM4aUcW7>
.
|
|
That was the problem. I set the slider joint just as they are done in the pendulum. Here is my diff: I basically added |
|
You should try to stick with the mujoco, I intend to support the openai code as closely as possible to support future updates. In case things do not work, just ask and I might be able to help. |
|
Did you continue to work on this? |
|
Hi, I haven't touched it in a few months. Been in the process of learning DQN's / DDPGs in general. Might pick back up in a few weeks though since I have some base line models. Originally I was doing a URDF version of fetch, I can try getting the MJCF version to work instead. One remaining issue with MJCF is the complete lack fo pybullet texturing control. So when I attempt to have a fetch bot that can reach torward an object, everything has 1 texture... Of course, its been a few months, so maybe things have changed. |
Added fetch/main.xml .
Results from loading:
Modified dir struct:

Notes:
The only change this pull request makes is adding a fetch robot that can be loaded without error.
I needed to comment out the
<cameratags (is there a way to support these or no?), and addtype="hinge"to joints that did not have the types. I went ahead and kept the backup files to compare the original and the changed xml.There are no fetch objects, environments, or anything else in this branch, however I plan to begin adding that code to my github as well. But still, I am making the pull request A. so that others can see that someone is trying to get the fetch to work, and B. so others might be willing to help.
Loaded via custom Fetch robot locomotor:
