The following repository contains all of the source code for my Masters Dissertation. Navigate to the v1 folder to view all of the respective code sections. Please note that the bulk of the machine learning code (semantic segmentation) model definition and training was done in the could and I have not yet added the code to this repository. I will hope to add it soon!
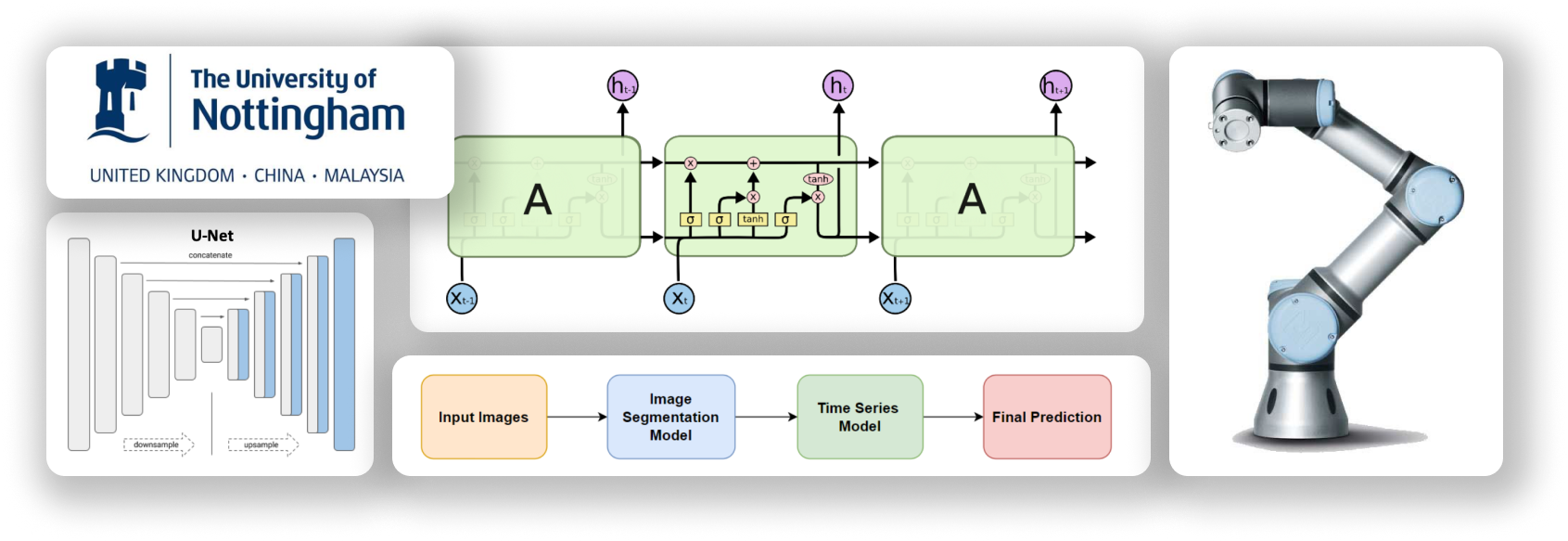
My official Masters dissertation topic was the “Non-Invasive Determination of the physical properties of objects using machine learned interpolation of the observation of robot arm manipulations.” In other words, this dissertation involved using machine learning and computer vision, together with robots to determine the physical properties of objects. The aim of this field of research is to bridge the gap between how humans and robots interact with their environment.
Here are some of the results obtained from the semantic segmentation model.
Example 1 with coloured masks:

Example 2 with binary mask:

Stacked LSTM test set performance statistics including precision, recall, F1 score and classification accuracy:
