
点云可视化
@双愚 , 若fork或star请注明来源
- open3D [
python] - mayavi[
python] - matplolib [
python] - rviz(ROS) topic可视化 [
c++][python] - pcl 点云可视化 [
c++]: pcl-visualization可视化
可视化软件:
- cloudcompare( Linux、Windows 和 MacOS )
- Meshlab( Linux、Windows 和 MacOS )
个人笔记:https://www.yuque.com/huangzhongqing/hre6tf/eak3ba
# 克隆包含子仓库:https://github.com/chaomath/open3d-kitti-visualization
git clone --recursive https://github.com/HuangCongQing/Point-Clouds-Visualization
参考自:
语义分割任务 classification task
- code: showpc_memo1
- data:1mayavi/data-whu
- 链接: https://pan.baidu.com/s/11EvyY71Y2qrHz5BXodDi3w 提取码: w9ar
目标检测跟踪任务 detection and tracking task
https://www.yuque.com/huangzhongqing/hre6tf/xk0gxn
修改文件:2open3D/practice/open3d-kitti-visualization/open3d_geometry/open3d_arrow.py
# mesh.transform(T)
# mesh.rotate([0,beta,0],center=False) # TypeError: rotate(): incompatible function arguments. The following argument types are supported:
# mesh.rotate([0,0,gamma],center=False)
# fix:w维度不对 np.expand_dims(np.array([0,beta,0], dtype=np.float64),1).shape
mesh.rotate(mesh.get_rotation_matrix_from_xyz((0,beta,0)), center=mesh.get_center())
mesh.rotate(mesh.get_rotation_matrix_from_xyz((0,0,gamma)), center=mesh.get_center())python版本: ubuntu20.04 ,ROS foxy版本
docs: https://www.yuque.com/huangzhongqing/ld627o/bovm2ar3ucgb8905
5ros1_cpp/src/lidar_visualization
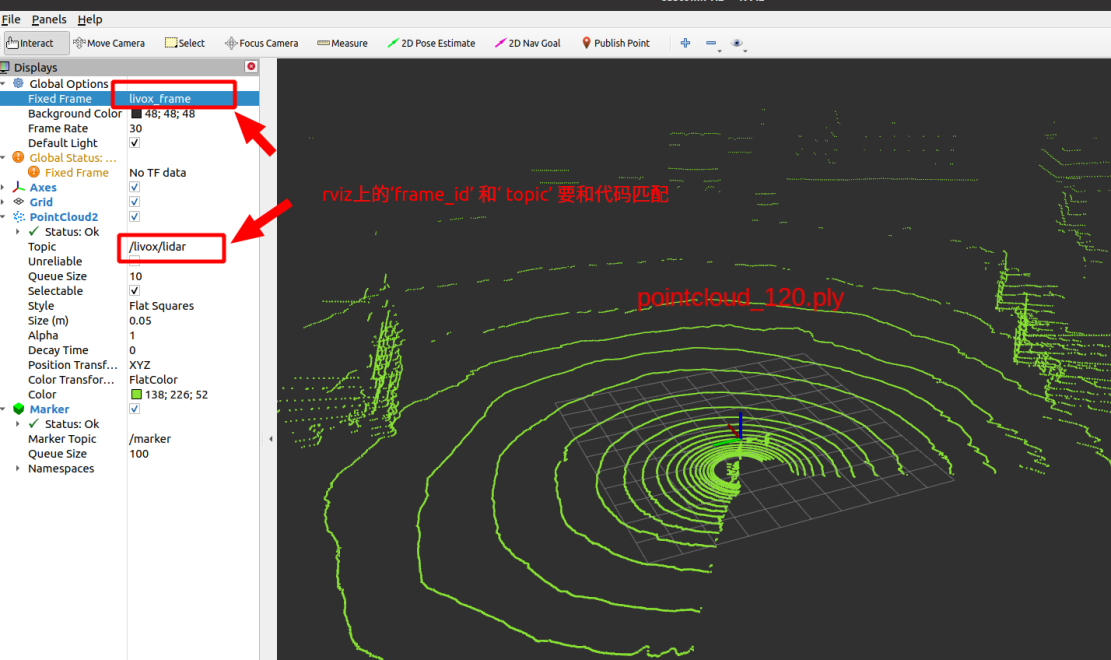
1 修改参数:根据自己的需要修改下面3个参数
// 参数设置
std::string frame_id = "livox_frame";
std::string lidar_topic = "/livox/lidar";
// PCD/PLY 文件夹路径
std::string pc_dir = "/home/hcq/project/board检测/ws_board/src/board_detection/testdata"; // 替换为您的PCD或PLY文件目录的路径
2 编译和运行:
# 编译
catkin_make
# 运行
## 方式1
rosrun lidar_visualization lidars_visualization
## 方式2
roslaunch lidar_visualization test.launch
可视化结果
Copyright (c) 双愚. All rights reserved.
Licensed under the MIT License.