

This is a set of python scripts and c++ programs used to construct a depth validation set with a Lidar generated point cloud. For a brief recap of what it does, see section How it works
See the corresponding article, or the project Website for more info.
If you find this tool useful for your research, please use this citation :
@article{pinard2023does,
title={Does it work outside this benchmark? Introducing the rigid depth constructor tool: Depth validation dataset construction in rigid scenes for the masses},
author={Pinard, Cl{\'e}ment and Manzanera, Antoine},
journal={Multimedia Tools and Applications},
pages={1--27},
year={2023},
publisher={Springer}
}
- Software Dependencies
- Hardware Dependencies
- How it works
- Usage
- Using the constructed dataset for evaluation
- Detailed method with the manoir example
- TODO
Note: There is a dockerfile in order to construct a docker image that automatically complies with all the software dependencies. You can just construct it with
docker build . -t my_image
These are the used tools, make sure to install them before running the scripts. Apart from CUDA, which you need to install by yourself, you can use the help script install_dependencies.sh to install them on ubuntu 20.04.
- CUDA (version : 10+)
- OpenCV (version, 4.0.0+)
- ETH3D Dataset-pipeline (version : master)
- Pytorch (version, 1.7.0+)
- COLMAP (version : master)
- PDrAW from AnafiSDK (version : master)
For PDrAW, there should be a native-wrapper.sh file that you to keep a track of. It's usually in groundsdk/out/pdraw-linux/staging/native-wrapper.sh(see here)
For COLMAP, you will need a vocab tree for feature matching. You can download them at https://demuc.de/colmap/#download . In our tests, we took the 256K version.
To recreate the results of the study, you will need these hardware pieces :
- Parrot Anafi
- DJI Matrice 600
- Velodyne Puck VLP16
Note that for our study, we provided the Anafi drone (~700€), and the point cloud was created by a private company (~3500€ for the whole scan process)
Here are the key steps of the dataset creation.
- This is only a summary, see Step by Step guide for a complete explanation of all commands and scripts used.
- See Running the full script for an automated version with minimum human intervention.
- See Detailed method with the manoir example for a concrete example with options used.
-
Data acquisition on a particular scene
- Make a photogrammetry flight plan with any drone, You can use e.g. the Anafi with the Pix4D capture app (it's free). It is important that pictures have GPS info in the exif
- Make some natural flights in the same scene, use either a Bebop2 or a Anafi to be able to use the PDraw tool. In theory this is possible to adapt the current scripts to any IMU-GPS-powered camera.
- Make a Lidar scan of this very scene, and clean the resulting 3D point cloud : this is a crucial part as Lidar data will be assumed perfect for the rest of the workflow. You need to also note the projection system used (e.g.
EPSG 2154) for geo registration. The file will a priori be a.lasfile with float64 values.
-
Convert the
.lasfloat64 point cloud into a.plyfloat32- As 3D values are global, x and y will be huge. You need to make the cloud 0-centered by subtracting its centroid to it.
- The centroid needs to be logged somewhere for future frame registration
- This step is done by the script
las2ply.py
-
Extract optimal frames from video for a thorough photogrammetry that will use a mix of pix4D flight plan pictures and video still frames.
- The total number of frame must not be too high to prevent the reconstruction from lasting too long on a single desktop (we recommand between 500 an 1000 images)
- At the same time, extract if possible information on camera parameters to identify which video sequences share the same parameters (e.g 4K videos vs 720p videos, or different levels of zooming)
- This step is done by the script
videos_to_colmap.py(See step by step guide, Step 5)
-
Georeference your images.
- For each frame with GPS position, convert them in XYZ coorindates in the projection system used by the Lidar point cloud (Here, EPSG:2154 was used)
- Substract to these coordinates the centroid that logged when converting the LAS file to PLY.
- Log image filename and centered XYZ position in a file for georegistration of the reconstruction point cloud
- This step is also done by the script
videos_to_colmap.py(See step by step guide, Step 5)
-
Generate sky maps of your drone pictures to help the photogrammetry filter out noise during matching (Step 6)
- Use a Neural Network to segment the drone picture and generate masks so that the black areas will be ignored
- This is done with the script
generate_sky_masks.py
-
Perform a photogrammetry on your pictures (See step by step guide, Steps 6 - 7 - 8)
- The recommended tool is COLMAP because further tools will use its output format
- You should get a sparse 3D model, exhaustive enough to :
- Be matched with the Lidar Point cloud
- Localize other video frames in the reconstruction
-
Change reconstructed point cloud with shift and scale to match Lidar point cloud
- See here for point cloud georegistration with colmap (See step by step guide, Step 9)
-
Video Localization :
- Continue the photogrammetry with video frames at a low fps (we took 1fps). We do this in order to keep the whole mapping at a linear time (See Step by step guide, Step 10.3)
- Merge all the resulting models into one full model with thorough photogrammetry frames and all the 1fps frames (See Step by step guide, Step 10.)
- Finish registering the remaning frames. For RAM reasons, every video is divided into chunks, so that a sequence registered is never more than e.g. 4000 frames (See Step by step guide, Step 10.)
- Filter the final model at full framerate : remove points with absurd angular and translational accleration. Interpolate the resulting discarded points (but keep a track of them). This is done in the script
filter_colmap_model.py(See step by step guide, Step 10.)
-
Densify the resulting point cloud with COLMAP (see here)
- Export a PLY file along with the VIS file with
colmap stereo_fusion(See step by step guide, Step 11)
- Export a PLY file along with the VIS file with
-
Match the Lidar Point cloud and full reconstruction point cloud together with ICP. (See step by step guide Step 12)
- The georegistration of the reconstructed point cloud should be sufficient to get a good starting point.
- By experience, the best method here is to use CloudCompare, but You can use ETH3D or PCL to do it
- The resulting transformation matrix should be stored in a TXT file, the same way cloudcompare proposes to do it
-
Construct a PLY+VIS file pair based on lidar scan (See step by step guide Step 13.2)
- The PLY file is basically every lidar point
- The VIS file stores frames from which point is visible : we reuse the PLY+VIS from step 6, and assume a lidar point has the same visibility as the closest point in the denified reconstructed point.
-
Run the delauney mesher tool from COLMAP to construct an occlusion mesh (See step by step guide Step 13.3)
-
Construct the Splats with ETH3D (See step by step guide Step 13.4)
-
Filter Video localization with SavGol filter to have a physically possible acceleration, and interpolate position for frame not localized. (See step by step guide Step 14)
-
Construct the ground truth Depth with ETH3D (See step by step guide Step 15)
-
Visualize and Convert the resulting dataset to match the format of a more well known dataset, like KITTI. (See step by step guide Step 16)
-
Construct the evaluation dataset by taking a subset of frames from the created dataset. (See step by step guide Step 17)
It is expected that you read the COLMAP tutorial in order to understand key COLMAP concepts and data structure : https://colmap.github.io/tutorial.html
You will be working with 3 different folders :
- Input directory : Where you store your acquired data : Lidar point clouds, photogrammetry pictures and videos
- Workspace : Data from input directory will be copied into this directory so that COLMAP can run several photogrammetry tasks
- Output folder: Where the processed data will be stored? This will be the biggest directory.
Structure your input folder so that it looks like this:
Input
├── Pictures
│ ├── folder1
│ │ ├── subfolder1
│ │ │ ├── 01.jpg
│ │ │ └── ...
│ │ ├── subfolder2
│ │ └── ..
│ └── folder2
├── Videos
│ └── no_groundtruth
└── Lidar
Picturescontains the photogrammetry pictures. They can be in jpeg or RAW format. The subfolder means a shared camera calibration. If two pictures are taken with the same camera but with different zoom levels, they need to be in separate folders.Videoscontaines the videos you took which will be converted into frames and then used in the photogrammetry process.no_groundtruthcontains the videos you want to use for the whole model reconstruction (the thorough photogrammetry step), but you don't want the whole video to be localized. Thus, no depth ground truth will be generated for these videos.- Other videos will be used for photogrammetry AND for localization, and depth and odometry will be produced for every frame of the video.
Lidarcontains the lidar models. They can beLASfiles orPLYfiles. In the case your point clouds are geo-referenced, you need to know what projection system was used in order to compute picture position with respect to the clouds using GPS coordinates.
Your workspace (which is different from the input folder !) will be used throughout your whole dataset creation pipeline. It should be stored on a SSD and is designed this way :
Workspace
├── Lidar
├── COLMAP_img_root
│ ├──Indivudal_pictures
│ │ ├── folder1
│ │ ├── folder2
│ │ └── ...
│ └──Videos
│ ├── resolution1
│ │ ├── video1
│ │ └── ...
│ ├── resolution2
│ └── ...
├── Masks
│ └── Same structure as 'COLMAP_img_root' folder
├── Thorough
│ ├── 0
│ ├── 1
│ ├── ...
│ ├── georef
│ ├── georef_full
│ └── dense
├── Video_reconstructions
│ ├── Same structure as 'COLMAP_img_root/Videos' folder
│ ├── resolution1
│ │ └── video1
│ │ ├── lowfps
│ │ ├── chunk_0
│ │ ├── chunk_1
│ │ ├── ...
│ │ └── final
│ └── ...
├── scan_thorough.db
├── lidar.mlp
└── aligned.mlp
Lidarwill store the point clouds converted and centered from LAS point cloudsCOLMAP_img_rootis the folder COLMAP will make its picture paths relative from. In every COLMAP command, it is always indicated with the option--image_path. Obviously, that is also where we store the pictures COLMAP will use.Individual picturescontains the pictures that were not extracted from a video, e.g. from a photogrammetry flight plan. Subfolders can be used. You need to ensure that for pictures in the same sub folders share the exact same camera calibration : image size, focal length, distorsion.Videoscontaines pictures extracted from videos. In each video folder, in addition to the video frame, ametadata.csvfile is stored in order to keep metadata, such as frame timestamp, image size, image calibration (if available, this is the case for Anafi videos), image position from GPS, and colmap database id. Note that we don't need to stores all the video frames in this folder at the same time. We only need a subset most of the time when mapping the whole reconstruction. When localizing the video frames, wall the frame sare in the directory, but you can remove them (apart from the subset) as soon as you are finished with localizing the video, and copy the frames in the output folder (see below)
Masksis a mirror ofCOLMAP_img_rootand for each image, there is a black and white picture used discard parts of the images for feature points computation. See https://colmap.github.io/faq.html#mask-image-regionsThoroughis the output of the first photogrammetry, the one that will try to reconstruct the whole model with a subset of the images we acquired, which will then be used to localized remaining images, as well as localize the Lidar point cloud with respect to the images.0, ... ,Nare the folder containing sparse models reconstructed by COLMAP with the functioncolmap mapper. See https://colmap.github.io/tutorial.html#sparse-reconstructiongeorefis the folder containing the geo-referenced model. When GPS is available, we use it to have a first guess to register the reconstructed model with the Lidar point cloud. Note that this also apply the right scale to the model. See https://colmap.github.io/faq.html#geo-registrationgeoref_fullis the folder containing the geo-referenced model, augmented with additional frames from videos localization.denseis the folder containing the dense mode. See https://colmap.github.io/tutorial.html#dense-reconstruction
Video_reconstructionsis the folder where we store the reconstruction for each video. It is based on thegeorefmodel. We then add a subset of the video frames (usually 1 fps) with thecolmap mapper, augment thegeoref_fullwith it (see https://colmap.github.io/faq.html#merge-disconnected-models), and localize the rest of the frames. Note that once all frames are localized, you no longer use the reconstruction until ground truth creation, so you can store it in the output folder as soon as you are finished with your videolowfpscontains the model with the subset of frameschunk_0tochunk_Ncontains the localized frames (but they do not contribute to the reconstruction). We cut the video in several chunks if the video is too long (and thus needs too much RAM)finalcontains a COLMAP model with only the frames of the very video we want to localize. Everything else than images localization (3D points, 2D feature points for each image, irrelevant camera models) is removed from the model.
scan_thorough.dbis the database file used by COLMAP for the thorough reconstruction. Note that it can become quite big, that's why it does not contain feature for all the video frames but only a subset.lidar.mlpis the MeshLabProject containing all the PLY files from Lidar scans. The meshlab project stores multiple PLY files and transformation information (in a 4x4 matrix) in a xml-like file.aligned.mlpis the MeshLabProject after the Lidar point clouds (i.e.lidar.mlp) have beed registered with respect to the photogrammetry pointcloud. The transformations are the ones to apply to the PLY file in order to be aligned to the COLMAP output.
You output directory is divided in 2 parts :
- Raw output directory, which will contain the full size images, with the depth maps generated by ETH3D
- Converted output directory, which will contain the resized images, with depths stored in numpy files, along with videos for visualization purpose.
Raw_output_directory
├── calibration
├── ground_truth_depth
│ ├── video1
│ ├── video2
│ └── ...
├── COLMAP_img_root
│ └── Same structure as 'Workspace/COLMAP_img_root' folder
├── models
│ └── Same structure as 'Workspace/Videos_reconstructions' folder
├── occlusion_depth
│ ├── video1
│ ├── video2
│ └── ...
└── points
calibrationByproduct of ETH3DGroundTruthCreator: where the colmap model used for the current video is stored. Overwritten for every video. All COLMAP models are already stored in the foldermodels.pointsAnother byproduct of ETH3DGroundTruthCreator: Lidar point cloud where points not seen by more than 2 images are discarded. Note that as incalibration, the file is overwritten for every video.ground_truth_depthFolder where ETH3DGroundTruthCreatorstored raw depth maps. Note that directory tree is not preserved, every video folder stem is stored in the root of the folder.occlusion_depthSame asground_truth_depthbut for occlusion depth maps instead of depth maps. Note that outputing this occlusion depth is optional and only serves visualization purpose for the conveted dataset.COLMAP_img_rootis a clone ofWorkspace/COLMAP_img_root. Contrary to the one in workspace, tt stores ALL the video frames so it can be very heavy.modelsis a clone ofWorkspace/Video_reconstructions, it contains all the models that were used for video localization.
Converted_output_directory
├── dataset
│ ├── resolution1
│ │ ├── video1
│ │ │ ├── poses.txt
│ │ │ ├── intrinsics.txt
│ │ │ ├── interpolated.txt
│ │ │ ├── not_registered.txt
│ │ │ ├── camera.yaml
│ │ │ ├── 0001.jpg
│ │ │ ├── 0001_intrinsics.txt
│ │ │ ├── 0001_camera.yaml
│ │ │ ├── 0001.npy
│ │ │ ├── 0002.jpg
│ │ │ └── ...
│ │ └── ...
│ ├── resolution2
│ ├── ...
│ └── individual_pictures
│ ├── folder1
│ ├── folder2
│ └── ...
└── visualization
├── resolution1
│ ├── video1.mp4
│ ├── video2.mp4
│ └── ...
├── resolution2
├── ...
└── individual_pictures
├── folder1
│ ├── 0001.png
│ └── ...
├── folder2
└── ...
datasetcontains the information that will be used for the actual evaluation. For every video, we have a folder containing :poses.txtfor frames odometry. It is a list of lines of 12 float numbers, representing the 4x4 transformation matrix, the first matrix is always identity. This format is the same KITTI odometry. Non localized frames have a transformation matrix ofNaNvalues.interpolated.txtis a list of all the fram paths that have an interpolated odometry. That way, depth are invalid, but odometry can be used to test depth algorithm that needs frame odometry.not_registered.txtis a list of all the fram paths that are not localized. They thus cannot be used for depth evaluation nor for odometry.intrinsics.txt(only if all the frames share the same camera) contains the intrinsics 3x3 matrix in a txt file (does not contains distortion parameters)camera.yaml(only if all the frames share the same camera) containes the camera parameters in COLMAP format, with distortions.- For every frame:
{name}.jpg{name}.npy{name}_intrinsics.txtand{name}_camera.yaml: only if frames don't share the same camera, sameintrinsics.txtandcamera.yamlabove.
- Each folder stem in the idividual picture directry is treated as a video
visualizationcontains images for vizualisation. Each video has a correspondign mp4 file. Individual pictures have a corresponding image file.

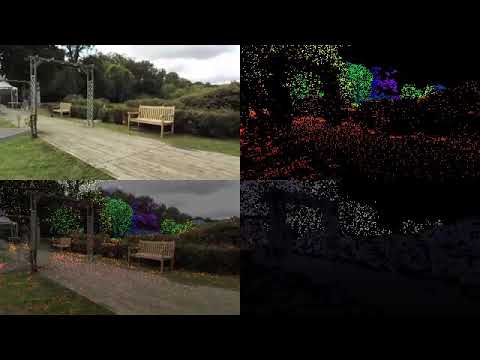
Image is divided in 4 parts :
┌───┬───┐
│ A │ B │
├───┼───┤
│ C │ D │
└───┴───┘
Ais raw imageBis normalized depth map. It follows OpenCV's Rainbow colormap. Note that OpenCV's rainbow is NOT the same as matplotlib's rainbow_gist.CisA + B / 2. It helps inspecting that depth and image are not shifted apart.Dis normalized occlusion depth map. It follows Matplotlib's Bone colormap. Its the same as OpenCV's Bone colormap See https://matplotlib.org/3.1.0/tutorials/colors/colormaps.html
Note that when frame localization is interpolated, a 5 pixels wide orange frame is visible at the edge of the picture.
You can run the whole script with python main_pipeline.py. If you don't have a lidar point cloud and want to use COLMAP reconstructed cloud as Groundtruth, you can use python main_pipeline_no_lidar.py which will be very similar, minus point cloud cleaning and registration steps.
Example command :
python main_pipeline.py \
--input_folder /media/user/data/input_dataset/ \
--raw_output_folder /media/user/data/ground_truth_raw/ \
--converted_output_folder /media/user/data/ground_truth_converted/ \
--workspace ../workspace \
--total_frames 600 --SOR 10 5 \
--eth3d ../dataset-pipeline/build/ \
--nw ../AnafiSDK/out/pdraw-linux/staging/native-wrapper.sh \
--generic_model OPENCV \
--max_num_matches 25000 \
--match_method exhaustive \
--multiple_models --registration_method interactive \
--mesh_resolution 0.1 --splats --splat_threshold 0.05 \
--lowfps 1 --save_space --log out.log --system epsg:3949 -vv
All the parameters for main_pipeline.py are defined in the file cli_utils.ply and can be retrieved with python main_pipeline.py -h. You will find below a summary :
-
Main options
--input_folder: Input Folder with LAS/PLY point clouds, videos, and images, defined above--workspace: Path to workspace where COLMAP operations will be done. It needs to be on a SSD, and size needed depends on video size, but should at least be 20 Go.--raw_output_folder: Path to output folder for raw depth maps. Must be very big, especially with 4K videos. for 4K30fps video, count around 60Go per minute of video.--converted_output_folder: Path to output folder for converted depth maps and visualization. Must be big but usually smaller than raw output because depth map is still uncompressed, but downscaled.--show_steps: If selected, will make a dry run just to list steps and their numbers.--skip_step: Skip the selected steps. Can be useful an operation is done manually)--begin_step: Skip all steps before this step. Useful when the script failed at some point--resume_work: If selected, will try to skip video aready localized, and ground truth already generated--inspect_dataset: If selected, will open a window to inspect the dataset at key steps. See https://github.com/ETH3D/dataset-pipeline#dataset-inspection--save_space: If selected, will try to save space in workspace by only extracting needed frames and removing them as soon as they are no longer needed. Strongly advised.--vid_ext: Video extensions to scrape from input folder. By default will search formp4andMP4files--pic_ext: Same as Video extensions, but for Image. By default will search forjpg,JPG,pngandPNGfiles.--raw_ext: Same as Video extensions, but for RAW image. By default will search forARW,NEFandDNGfiles.
-
Executable files
--nw: Native wrapper location. See https://developer.parrot.com/docs/pdraw/installation.html#run-pdraw--colmap: Colmap exec location. Usually justColmapif it has been installed system-wide.--ffmpeg: ffmpeg exec location. Usually justffmpegif it has been installed system-wide.--eth3d: ETH3D dataset pipeline exec files folder location. Usually atdataset-pipeline/build/.--pcl_util: PCL util exec files. Usually atpcl_util/build(source in this repo)--log: If set, will output stdout and stderr of these exec files to a log file, which can be read from anther terminal withtail.
-
Lidar point cloud preparation
--pointcloud_resolution: If set, will subsample the Lidar point clouds at the chosen resolution.--SOR: Satistical Outlier Removal parameters. This accepts 2 arguments : Number of nearest neighbours and max relative distance to standard deviation. See https://pcl.readthedocs.io/projects/tutorials/en/latest/statistical_outlier.html--registration_method: Method use for point cloud registration, chose between "simple", "eth3d" and "interactive" ("simple" by default). See Manual step by step : step 11')
-
Video extractor
--total_frames: Total number of frames that will be used for the first thorough photogrammetry. By default 500, keep this number below 1000.--orientation_weight: Weight applied to orientation during optimal sample. Higher means two pictures with same location but different orientation will be considered further apart.--resolution_weight: Same as orientation, but with image size.--max_sequence_length: COLMAP needs to load ALL the feature matches to register new frames. As such, some videos are too long to fit in RAM, and we need to divide the video in Chunks that will treated separately and then merged together. This parameter is the number max of frames for a chunk. Ideal value is around 500 frames for 1Go of RAM, regardless of resolution.--num_neighbours: number of frames overlapping between chunks. This is for merge purpose.--system: coordinates system used for GPS, should be the same as the LAS files used.--lowfps: framerate at which videos will be scanned WITH reconstruction. 1fps by default--include_lowfps_thorough: if selected, will include videos frames at lowfps for thorough scan (longer). This can be useful when some videos are not GPS localized (e.g. handhel camera) and are still relevant for the thorough photogrammetry.
-
Photogrammetry
--max_num_matches: Max number of matches, lower it if you get GPU memory error.--vocab_tree: Pah to vocab tree, can be downloaded here--multiple_models: If selected, will let colmap mapper do multiple models. The biggest one will then be chosen--more_sift_features: If selected, will activate the COLMAP optionsSiftExtraction.domain_size_poolingand--SiftExtraction.estimate_affine_shapeduring feature extraction. Be careful, this does not use GPU and is thus very slow. More info : https://colmap.github.io/faq.html#increase-number-of-matches-sparse-3d-points--add_new_videos: If selected, will skip the mapping steps to directly register new video with respect to an already existing colmap model.--filter_models: If selected, will filter video localization to smooth trajectory--stereo_min_depth: Min depth for PatchMatch Stereo used during point cloud densification--stereo_max_depth: Same as min depth but for max depth.
-
Occlusion Mesh
--normals_method: Method used for normal computation between radius and nearest neighbours.--normals_radius: If radius method for normals, radius within which other points will be considered neighbours--normals_neighbours: If nearest neighbours method chosen, number of neighbours to consider. Could be very close or very far points, but has a constant complexity.--mesh_resolution: Mesh resolution for occlusion in meters. Higher means more coarse. (default 0.2, i.e. 20cm)--splats: If selected, will create splats for points in the cloud that are far from the occlusion mesh.--splat_threshold: Distance from occlusion mesh at which a splat will be created for a particular point (default, 10cm)--max_splate_size: Splat size is defined by mean istance from its neighbours. You can define a max splat size for isolated points which otherwise would make a very large useless splat. If not set, will be2.5*splat_threshold.
-
Ground truth creation
--eth3d_splat_radius: Splat radius for occlusion mesh boundaries, radius of area (in meters) which will be defined as invalid because of occlusion uncertainty, seesplat_radiusoption for ETH3D. Thumb rule here is that it should be around your point cloud precision. (default 0.01, i.e. 1cm)--output_rescale: rescale cameras before creating groundtruth maps (typically, a value between 0 and 1 to save space)--output_width: rescale cameras so that their width match a given value. Note that contrary to the former option, this one ensures that all images will have the same width, and the same height if they share the same ratio (useful, if you want to evaluate a depth algorithm that has a fixed image size)
Tip : As a lot of log information will go through your terminal, you can use -vv and --log out.log in order to have two terminals with different verbose levels.
- 1st terminal :
main_pipelinescript, with-vvand--log out.logselected - 2nd terminal :
tail -f out.log
First terminal will log information about the general workflow without details Second terminal will log information given by COLMAP and other commands (much more verbose)
This will help you to have information about e.g. what video the script is working on, and also what is being currently done by COLMAP.
This will essentially do the same thing as the script, in order to let you change some steps at will.
-
Point cloud preparation
python las2ply.py Input/Lidar/cloud.las \ --output_folder Workspace/LidarThis will save a ply file along with a centroid file
Workspace/Lidar/cloud.plyWorkspace/Lidar/cloud_centroid.txtThis file will be used
Note on centroid : Contrary to LAS files which are 64bit floats, PLY is used with 32bit foats, which cannot store large numbers with high values. The centroid is there to make every geo-referenced position (which can be as high as 20,000 km), be it from LAS file or from GPS coordinates centered around zero and thus usable in float32. This file will thus be used when extracting GPS metadata from pictures or videos and converting the values in
XYZcoordinates relative to your point cloud.Note that this also work for ply files, but most ply files are already centered around zero, so you can instead just copy the ply file and optionally write a centroid file with
0\n0\n0\ninside. -
Point Cloud Cleaning For each ply file :
ETHD3D/build/PointCloudCleaner \ --in Workspace/Lidar/cloud.ply \ --filter 5,10(local outliers removal, doesn't necessarily remove isolated points) or
pcl_util/build/CloudSOR \ --input Workspace/Lidar/cloud.ply \ --output Workspace/Lidar/cloud_filtered.ply \ --knn 5 --std 6 -
Meshlab Project creation This step will construct a MeshLabProject file. It stores multiple PLY files and transformation information (in a 4x4 matrix) in the same file. During creation, every point cloud has identity for transformation.
python meshlab_xml_writer.py create \ --input_models Workspace/Lidar/cloud1_filtered.ply [.. Workspace/Lidar/cloudN_filtered.ply] \ --output_meshlab Workspace/lidar.mlpOptionally, if we have multiple lidar scans, we can run a registration step with ETH3D
This will run an ICP on the different ply models and store the resulting transformations in the
lidar.mlpfile.ETHD3D/build/ICPScanAligner \ -i Workspace/lidar.mlp \ -o Workspace/lidar.mlp --number_of_scales 5 -
Photogrammetry pictures preparation.
This step can be skipped if there are only videos. It consists in 4 substeps
-
Convert all your frames to either jpg or png and copy them to the folder
Workspace/COLMAP_img_root/individual_pictures. Frames sharing the same subfolder MUST have the same camera calibration, i.e. taken from the same camera, with the same lense, and the same zoom level. It is advised to try to keep as few camera models as possible in order to improve COLMAP stability. -
(Optional) Generate sky masks in order to avoid using keypoints from clouds. See https://colmap.github.io/faq.html#mask-image-regions
python generate_sky_masks.py \ --img_dir Workspace/COLMAP_img_root \ --colmap_img_root Workspace/COLMAP_img_root \ --mask_root Workspace/Masks \ --batch_size 8- This script will find recursively all image files (jpg or png) in folder given to
--img_dirand create black and white mask images to prevent COLMAP from find feature points in the sky (where the clouds are moving). --colmap_img_rootandmask_rootare given so that the mask for the image file located at e.g.{--colmap_img_root}/relative_path/image.jpgwill be saved under the name{--mask_root}/relative_path/image.jpg.png.- Note that COLMAP is flexible to some images corresponding mask, and some images without. As such, you can run the script to only a subfolder of
Workspace/COLMAP_img_root. This is especially interesting if the dataset has indoor videos where sky is never on screen and thus running script would only generate false positives.
- Run the feature extractor COLMAP command.
colmap feature_extractor \ --database_path Workspace/thorough_scan.db \ --image_path Workspace/COLMAP_img_root \ --ImageReader.mask_path Workspace/Masks \ --ImageReader.camera_model RADIAL \ --ImageReader.single_camera_per_folder 1 \--database_pathis the Database file that COLMAP will use throughout the whole photogrammetry process.--ImageReader.camera_modelis on of the camera models compatible with COLMAP. See https://colmap.github.io/cameras.html--ImageReader.single_camera_per_foldermakes COLMAP set every image in the same forlder to share the same camera parameters this will greatly improve the photogrammetry stability. This is only relevant if your pictures are indeed from the same camera parameters (including zoom).
We don't explicitely need to extract features before having video frames, but this will populate the
/path/to/scan.dbfile with the photogrammetry pictures and corresponding id that will be reserved for future version of the file. -
-
Video frames addition to COLMAP db file
python video_to_colmap.py \ --video_folder Input/Videos \ --system epsg:2154 \ --centroid_path Workspace/Lidar/cloud_centroid.txt \ --colmap_img_root Workspace/COLMAP_img_root \ --nw /path/to/anafi/native-wrapper.sh \ --fps 1 \ --total_frames 1000 \ --max_sequence_length 4000 \ --save_space \ --thorough_db Workspace/scan_thorough.db--video_folderis the folder where you stored all your videos in MP4 files. For other video file formats, you can use the option--vid_ext .avifor e.g. also taking theavifiles. The format must be readable by ffmpeg. See https://ffmpeg.org/ffmpeg-formats.html#Demuxers--systemis the gps coordinates system parameter (hereepsg:2154). It is the one used in the LAS point cloud. The geo localized frame will then be localized inside the point cloud, which will help register the COLMAP reconstructed point with the Lidar PointCloud. See more info here. It must be compatible with Proj.--nwis the file we use to access PDraW tools, includingvmeta-extractwhich will convert Anafi metadata into a csv file. See https://developer.parrot.com/docs/pdraw/userguide.html#use-the-pdraw-program--centroid_pathis the file that was created in the first step when LAS files were converted into PLY files.--fpsis the framerate at which videos will be subsampeld when running the mapper at step 10.--save_spaceindicates that not all frames will be extracted from the videos, as it can become quite heavy. Only the frames that are When localizing the video (see step 10), you will have to extract the whole video, but until this step it is not needed.
What this script does :
- For each MP4 file found in the folder
--video_folder:- Create the folder
{--colmap_img_root}/Videos/{resolution}/{video_name}where we will store files related to this video frame. For example with the example command above and a full HD video namedvideo.mp4, the script will create the folderWorkspace/COLMAP_img_root/Videos/1920x1080/video - Extract metadata if possible (see note below), and save in the CSV file
metadata.csvin the folder created. See second note below for expected generic metadata. GPS data is converted to XYZ using the coordinate system given in--system. For videos without metadata, at least frame number, frame name, framerate and frame size are stored. - Use the metadata to select a spatially optimal subset of frames from the full video for a photogrammetry with
--total_framespictures (1000 frames in this example). 1000 pictures might be overkill for scenes with low complexity (e.g. only one building), you can easily reduce it to 500 if reconstruction is too slow.
- The optimal subset is obtained by taking all videos with XYZ positions and making a subset with K-Means. It is better than just taking frames at a low framerate, because camera motion is not necessarily homogeneous (especially for drone who are often on a fixed point) and we avoid unecessarily sampling multiple almost identical frames.
- If orientation is available in a quaternion QwQxQyQz, K-Means are applied on the 6D cloud
[X,Y,Z,Qx,Qy,Qz]. That way, frames that share the same position but have different orientation, can be both sampled. - The K-means is weighted A quality index is also applied (given by
width * height / framerate), in order to use more frames of better quality. This is used for example with Anafi videos, where high framerate videos tend to have lower quality for the same resolution. - If no GPS is available, but relative position is available (e.g. indoor flight data), each sequence will be optimally sampled without comparing it to other video sequences.
- populate the database given in
--thorough_dbwith these new entries with the right camera parameters (e.g. PINHOLE camera for Anafi videos, all videos taken with the same drone and the same zoom level will share the same camera parameters). If no metadata is available, we adopt the same policy as COLMAP during feature extraction when using option--ImageReader.single_camera_per_folder(see step 4). - Divide video into chunks of size
--max_sequence_lengthwith corresponding list of filepath so that we don't deal with too large sequences during the video localization step (see step 10). Each chunk will have the list of frames stored in a filefull_chunk_N.txtinside the video folder. - Extract frames from the videos and save it to the folder
{--colmap_img_root}/Videos/{resolution}/{video_name}. if--save_spaceis selected, only extract sampled frames (use for Spar reconstruction) and frames at framerate--fps(used for Reconstruction densification, i.e. Multi view stereo) - Create
1+ntxt files with list of file paths and save it to the same folder as the frameslowfps.txt: list of frames at framerate approximatively--fpsfull_chunk_{n}.txt: list of frames for each ofnchunk into which the video was divided. Thegeoref.txtis unused. It contains file paths and XYZ coordinates of sampled frames + video frames at low framerate. See below.
- Create the folder
- Create two txt files with list of file paths and save it at the root of
--colmap_img_root:video_frames_for_thorough_scan.txt: all images used in the first thorough photogrammetry. This will be used for feature extraction in order to not extract every feature from every frame. Indeed, the matching step in COLMAP will try to match EVERY frame in its database, and thus if we extract features from all frames, w will match every video frame (potentially thousands) which not what we want because otherwise the reconstruction would be unnecessarily long.georef.txt: all images with XYZ position from GPS, with system and minus centroid of Lidar file. This will be used at the georeferencing step. See https://colmap.github.io/faq.html#geo-registration. This will provide a first transformation estimation for the geo registered Lidar cloud. In the case XYZ data is available without GPS (e.g. indoor flight data), the video sequence with the largest radius covered is used as "valid GPS". That way, even if the geo-registered model is not a good transformation estimate for Lidar point cloud, we at least have a good scale estimate.
- Create a COLMAP model (
images.bin,points3D,cameras.bin) at the root of{--colmap_img_root}/Videoswithout any 3D points, but with cameras specifications and images localizations from metadata. It can be used for inspection purpose (You will need an X server). See https://colmap.github.io/gui.html
colmap gui \ --import_path Workspace/COLMAP_img_root/Videos \ --database_path Workspace/scan_thorough.db \ --image_path Workspace/COLMAP_img_root
Notes
-
This script is designed to circumvent the fact that COLMAP will try to compute the features of all the images in the database, will try to match all the feature vectors in the database, and try to map a reconstruction with all the matches. As such, if we add all the video frames to the databse we won't be able to run the photogrammetry with only a subset of the video frames. In order to do so, we add all the frames to a fictive database and note the image id numbers in the video metadata for later use. We then construct a small database with only the frames we want. And each time we want to add frames to this database, we add it with the id numbers that was generated for the fictive database, with the right camera id. See https://colmap.github.io/tutorial.html#database-management
-
This script is initially intended to be used for Anafi video, with metadata directly embedded in the video feed. However, if you have other videos with the same kind of metadata (GPS, timestamp, orientation ...), you kind manually put them in a csv file that will be named
[video_name]_metadata.csvalongside the video file[vide_name].mp4. One row per frame, obligatory fields are :camera_model: See https://colmap.github.io/cameras.htmlcamera_params: COLMAP format : tuples beginning with focal length(s) and then distortion paramsx,y,z: Frames positions : if not known, put nanframe_quat_w,frame_quat_x,frame_quat_y,frame_quat_z: Frame orientations : if not known, put nanlocation_valid: Whetherx,y,zposition should be trusted as absolute with respect to the point cloud or not. Ifx,y,zpositions are known but only reltive to each other, we can still leverage that data for COLMAP optimal sample, and later model rescaling after thorough photogrammetry.time: timestamp, in microseconds.
An exemple of this metadata csv generaton can be found with
convert_euroc.py, which will convert EuRoC dataset to videos with readable metadata.Finally, if no metadata is available for your video, because e.g. it is a handheld video, the script will consider your video as generic : it won't be used for thorough photogrammetry (unless the
--include_lowfpsoption is chosen), but it will try to localize it and find the cameras intrinsics. Be warned that it is not compatible with variable zoom.
-
Feature extraction for video frames used for thorough photogrammetry
python generate_sky_masks.py \ --img_dir Workspace/COLMAP_img_root \ --colmap_img_root Workspace/COLMAP_img_root \ --mask_root Workspace/Masks \ --batch_size 8(this is the same command as step 4)
colmap feature_extractor \ --database_path Workspace/thorough_scan.db \ --image_path Workspace/COLMAP_img_root \ --image_list_path Workspace/COLMAP_img_root/video_frames_for_thorough_scan.txt --ImageReader.mask_path Path/to/images_mask/ \--image_list_pathis the path to the list frames for thorough scan we created at previous step. As such, shoud any other picture that the one we need for photogrammetry exist somewhere in the folder--image_path, it will be ignored.- Contrary to step 4, instead of creating new database entries for the video frames, the feature extractor will use here already existing database entries (that we have set during the videos to colmap step), making sure that the right camera id is used.
- We recommand you also make your own vocab_tree with image indexes, this will make the next matching steps faster. You can download a vocab_tree at https://demuc.de/colmap/#download : We took the 256K version in our tests.
colmap vocab_tree_retriever \ --database_path Workspace/thorough_scan.db \ --vocab_tree_path /path/to/vocab_tree.bin \ --output_index Workspace/indexed_vocab_tree.bin -
Feature matching. For less than 1000 images, you can use exhaustive matching (this will take around 2hours). If there is too much images, you can use either spatial matching or vocab tree matching
colmap exhaustive_matcher \ --database_path Workspace/thorough_scan.db \ --SiftMatching.guided_matching 1or
colmap spatial_matcher \ --database_path Workspace/thorough_scan.db \ --SiftMatching.guided_matching 1 --SequentialMatching.loop_detection 1 \ --SequentialMatching.vocab_tree_path Workspace/indexed_vocab_tree.binor
colmap vocab_tree_matcher \ --database_path Workspace/thorough_scan.db \ --VocabTreeMatching.vocab_tree_path Workspace/indexed_vocab_tree.bin --SiftMatching.guided_matching 1Note that
--SiftMatching.guided_matchingwill take twice as much GPU memory, but will have more matches, and of higher quality. -
Thorough mapping.
colmap mapper \ --database_path Workspace/thorough_scan.db \ --output_path Workspace/Thorough \ --image_path Workspace/COLMAP_img_rootThis will create multiple models located in folder named
output/sparse/N,Nbeing a number, starting from 0. Each model will be, in the form of 3 filesWorkspace └── Thorough └── N ├── cameras.bin ├── images.bin ├── points3D.bin └── project.iniCOLMAP creates multiple models in the case the model has multiple sets of images that don't overlap. Most of the time, there will be only 1 model (named
0). Depending on the frame used for initialization, it can happen that the biggest model is not the first. Here we will assume that it is indeed the first (0), but you are exepcted to change that number if it is not the most complete model COLMAP could construct. You can inspect the different models with the COLMAP gui (You will need an X server). See https://colmap.github.io/gui.htmlcolmap gui \ --import_path Workspace/Thorough/N/ \ --database_path Workspace/scan_thorough.db \ --image_path Workspace/COLMAP_img_rootYou can finally add a last bundle adjustment using
colmap bundle_adjuster, which makes use of Ceres, supposedly better than the multicore used incolmap mapper(albeit slower)colmap bundle_adjuster \ --input_path /path/to/thorough/0 --output_path /path/to/thorough/0 -
Georeferencing
mkdir -p /path/to/geo_registered_model colmap model_aligner \ --input_path Workspace/Thorough/0/ \ --output_path Workspace/Thorough/georef \ --ref_images_path Workspace/COLMAP_img_root/georef.txt --robust_alignment_max_error 5See https://colmap.github.io/faq.html#geo-registration This model will be the reference model, every further models and frames localization will be done with respect to this one. Even if we could, we don't run Point cloud registration right now, as the next steps will help us to have a more complete point cloud.
make the first iteration of georef_full by simply copying the
georefmodel intogeoref_fullcp -r Workspace/Thorough/georef Workspace/Thorough/georef_full -
Video Localization
Tasks for each video.
video_folderis a placeholder for the folderWorkspace/COLMAP_img_root/Videos/{resolution}/{video_name}where frames, frame lists and metadata are stored.video_workspaceis a placeholder for the folderWorkspace/Videos_reconstructions/{resolution}/{video_name}where database files and models will be stored.
-
(Step 10.1) Make a first copy of
scan_thorough.dbin order to populate this database with the current video frames at lowfps. This will be used for mapping (see step 10.3)cp -r Workspace/thorough_scan.db video_workspace/lowfps.db -
(Step 10.2) If
--save_spaceoption was used during step 5. when calling scriptvideo_to_colmap.py, you now need to extract all the frames of the video to same directory thevideos_to_colmap.pyscript exported the frame subset of this video.ffmpeg \ -i Input/video.mp4 \ -vsync 0 -qscale:v 2 \ video_folder/{video_name}_%05d.jpg -
(Step 10.3) Continue mapping from georef with low fps images, use sequential matcher
python generate_sky_masks.py \ --img_dir video_folder \ --colmap_img_root Workspace/COLMAP_img_root \ --maskroot Workspace/Masks \ --batch_size 8python add_video_to_db.py \ --frame_list video_folder/lowfps.txt \ --metadata video_folder/metadata.csv\ --database video_workspace/lowfps.dbThis scripts add the lowfps frames to the database and makes sure that the right camera id is given, thanks to the csv file given in
--metadata.colmap feature_extractor \ --database_path video_worskpace/lowfps.db \ --image_path Workspace/COLMAP_img_root \ --image_list_path video_folder/lowfps.txt --ImageReader.mask_path Workspace/Masks/colmap sequential_matcher \ --database_path /video_workspace/lowfps.db \ --SequentialMatching.loop_detection 1 \ --SequentialMatching.vocab_tree_path Workspace/indexed_vocab_tree.bincolmap mapper \ --input Workspace/Thorough/georef \ --output video_workspace/lowfps_model \ --Mapper.fix_existing_images 1 --database_path video_workspace/lowfps.db \ --image_path Workspace/COLMAP_img_root--Mapper.fix_existing_imagesprevent bundle adjuster from moving already existing images. -
(Step 10.4) Re-georeference the model
This is a tricky part : to ease convergence, the mapper normalizes the model, losing the initial georeferencing. To avoid this problem, we merge the model back to the first one. the order between input1 and input2 is important as the transformation is applied to input2.
colmap model_merger \ --input_path1 Workspace/Thorough/georef_full \ --input_path2 video_workspace/lowfps_model \ --output video_workspace/lowfps_model -
(Step 10.5) Add mapped frame to the full model that will be used for Lidar registration
colmap model_merger \ --input_path1 Workspace/Thorough/georef_full \ --input_path2 video_workspace/lowfps_model \ --output Workspace/Thorough/georef_fullEach video reconstruction will incrementally add more and more images to the
georef_fullmodel. -
(Step 10.6) Register the remaining frames of the videos, without mapping. This is done by chunks in order to avoid RAM problems.
Chunks are created during step 5, when calling script
videos_to_colmap.py. For each chunkN, make a copy of the scan database and do the same operations as above, minus the mapping, replaced with image registration.cp video_workspace/lowfps.db video_workspace/chunk_n.dbpython add_video_to_db.py \ --frame_list video_folder/full_chunk_n.txt \ --metadata video_folder/metadata.csv\ --database video_workspace/chunk_n.dbcolmap feature_extractor \ --database_path video_workspace/chunk_n.db \ --image_path Workspace/COLMAP_img_root \ --image_list_path video_folder/full_n.txt --ImageReader.mask_path Workspace/Maskscolmap sequential_matcher \ --database_path video_workspace/chunk_n.db \ --SequentialMatching.loop_detection 1 \ --SequentialMatching.vocab_tree_path Workspace/indexed_vocab_tree.bincolmap image_registrator \ --database_path video_workspace/chunk_n.db \ --input_path video_workspace/lowfps_model --output_path video_workspace/chunk_n_model(optional bundle adjustment)
colmap bundle_adjuster \ --input_path video_workspace/chunk_n_model \ --output_path video_workspace/chunk_n_model \ --BundleAdjustment.max_num_iterations 10if first chunk, simply copy
video_workspace/chunk_n_modeltovideo_workspace/full_video_model. Otherwise:colmap model_merger \ --input1 video_workspace/full_video_model \ --input2 video_workspace/chunk_n_model \ --output video_workspace/full_video_modelAt the end of this step, you should have a model with all the (localizable) frames of the videos + the other frames that where used for the first thorough photogrammetry
-
(Step 10.7) Extract the frame position from the resulting model
python extract_video_from_model.py \ --input_model video_workspace/full_video_model \ --output_model video_workspace/final_model \ --metadata_path video_folder/metadata.csv --output_format txt -
(Step 10.9) Save frames and models in
Raw_output_directorycp -r video_workspace Raw_output_directory/models/{resolution}/{video_name} cp -r video_folder Raw_output_directory/COLMAP_img_root/Videos/{resolution}/{video_name}This will be used for Groundtruth creation step
-
(Step 10.8) If needed, everything in
video_workspaceexceptfinal_modelcan be deleted, and every frame that is neither inWorkspace/COLMAP_img_root/video_frames_for_thorough_scan.txtnor invideo_folder/lowfps.txtcan be deleted fromvideo_folder.
At the end of these per-video-tasks, you should have a model at
/path/to/georef_fullwith all photogrammetry images + localization of video frames at 1fps, and for each video a TXT file with positions with respect to the first geo-registered reconstruction. -
Point cloud densification
colmap image_undistorter \ --image_path Workspace/COLMAP_img_root \ --input_path Workspace/Thorough/georef_full \ --output_path Workspace/Thorough/dense \ --output_type COLMAP \ --max_image_size 1000max_image_sizeoption is optional but recommended if you want to save space when dealing with 4K images. This command transform thegeoref_fullmodel, in which we put the frames localized during the first photogrammetry but also all video frames at low framerate, into a model with only PINHOLE images, and prepare the workspace for the patch match stereo step which will try to compute a depth map for every frame with multi-view stereo. See https://colmap.github.io/tutorial.html#dense-reconstructioncolmap patch_match_stereo \ --workspace_path Workspace/Thorough/dense \ --workspace_format COLMAP \ --PatchMatchStereo.geom_consistency 1--PatchMatchStereo.geom_consistencyis used to filter out invalid depth values. The process is twice as long, but the noise is greatly reduced, which is what we want for lidar registration.colmap stereo_fusion \ --workspace_path Workspace/thorough/dense \ --workspace_format COLMAP \ --input_type geometric \ --output_path Workspace/Thorough/georef_dense.plyThis will also create a
Workspace/Thorough/georef_dense.ply.visfile which describes frames from which each point is visible. -
Point cloud registration
Determine the transformation to apply to
Workspace/lidar.mlpto get toWorkspace/Thorough/georef_dense.plyso that we can have the pose of the cameras with respect to the lidar.-
Option 1 : construct a meshlab project similar to
Workspace/lidar.mlpwithWorkspace/Thorough/georef_dense.plyas first mesh and run ETH3D's registration toolpython meshlab_xml_writer.py add \ --input_models Workspace/Thorough/georef_dense.ply \ --start_index 0 \ --input_meshlab Workspace/lidar.mlp \ --output_meshlab Workspace/aligned.mlpETHD3D/build/ICPScanAligner \ -i Workspace/aligned.mlp \ -o Workspace/aligned.mlp \ --number_of_scales 5The second matrix in
Workspace/aligned.mlpwill be the matrix transform fromWorkspace/lidar.mlptoWorkspace/Thorough/georef_dense.plyImportante note : This operation doesn't work for scale adjustments. Theoretically, if the video frames are gps localized, it should no be a problem, but it can be a problem with very large models where a small scale error will be responsible for large displacement errors locally.
-
Option 2 : construct a PLY file from lidar scans and register the reconstructed cloud with respect to the lidar, with PCL or CloudCompare. We do this way (and not from lidar to reconstructed), because it is usually easier to register the cloud with less points with classic ICP)
Convert meshlab project to PLY with normals :
ETHD3D/build/NormalEstimator \ -i Workspace/lidar.mlp \ -o Workspace/Lidar/lidar_with_normals.plyAnd then:
-
Use PCL
pcl_util/build/CloudRegistrator \ --georef Workspace/Thorough/georef_dense.ply \ --lidar Workspace/Lidar/lidar_with_normals.ply \ --output_matrix Workspace/matrix_thorough.txt -
Or use CloudCompare https://www.cloudcompare.org/doc/wiki/index.php?title=Alignment_and_Registration Best results were maintened with these consecutive steps :
- Crop the Workspace/Thorough/georef_dense.ply cloud, otherwise the Octomap will be very inefficient, and the cloud usually has very far outliers. See Cross section.
- Apply noise filtering on cropped cloud . See Noise filter.
- (Optional, you may skip it if e.g. the frames are gps localized) Manually apply a rough registration with point pair picking. See Align.
- Apply fine registration, with final overlap of 50%, scale adjustment, and Enable farthest point removal. See ICP
- Save resulting registration matrix in
Workspace/ùmatrix_thorough.txt
For the fine registration part, as said earlier, the aligned cloud is the reconstruction and the reference cloud is the lidar
-
Finally, apply the registration matrix to
/path/to/lidar/mlpto get/path/to/registered.mlpNote thatWorkspace/matrix_thorough.txtstores the inverse of the matrix we want, so you have to invert it and save back the result.``` python meshlab_xml_writer.py transform \ --input_meshlab Workspace/lidar.mlp \ --output_meshlab Workspace/aligned.mlp \ --transform Workspace/matrix_thorough.txt --inverse ``` -
-
Occlusion Mesh generation
Use COLMAP delaunay mesher to generate a mesh from PLY + VIS. Normally, COLMAP expect the cloud it generated when running the
stereo_fusionstep, but we use the lidar point cloud instead.-
Get a PLY file for the registered lidar point cloud
ETHD3D/build/NormalEstimator \ -i Workspace/aligned.mlp \ -o Workspace/lidar/lidar_with_normals.ply -
Create a Vis file with point visibility in the same way it is done with
georef_dense.ply.vispcl_util/build/CreateVisFile \ --georef_dense Workspace/Thorough/georef_dense.ply \ --lidar Workspace/Lidar/lidar_with_normals.ply \ --output_cloud Workspace/Thorough/dense/fused.ply \ --resolution 0.2This is important to place the resulting point cloud at root of COLMAP MVS workspace
/path/to/densethat was used for generating/path/to/georef_dense.plyand name itfused.plybecause it is hardwritten on COLMAP's code. The file/path/to/fused.ply.viswill also be generated. The--resolutionoption is used to reduce the computational load of the next step. -
Run Delauney Mesher
colmap delaunay_mesher \ --input_type dense \ --input_path Workspace/Thorough/dense \ --output_path Workspace/Lidar/occlusion_mesh.ply -
Generate splats for lidar points outside of occlusion mesh close range. See https://github.com/ETH3D/dataset-pipeline#splat-creation
ETH3D/build/SplatCreator \ --point_normal_cloud_path Workspace/Lidar/lidar_with_normals.ply \ --mesh_path Workspace/Lidar/occlusion_mesh.ply \ --output_path Workspace/Lidar/splats.ply --distance_threshold 0.1 --max_splat_size 0.25For every point in
--point_normal_cloud_path, distance from mesh given in--mesh_pathis computed, and if it is higher than,--distance threshold, it creates a square oriented by cloud normal. The square size given by minimum between the distance of the points from its 4 nearest neighbours and--max_splat_size. The--max_splat_sizeprevents potentially isolated points to have an enormous splat.
-
-
Video localization filtering and interpolation.
video_folderandvideo_workspaceare placeholders following the different convention from step 10, because they are located in Raw_output_directory.video_folderis the placeholder forRaw_output_directory/COLMAP_img_root/Videos/{resolution}/{video_name}video_workspaceis the placeholder forRaw_output_directory/models/{resolution}/{video_name}Filter the image sequence to exclude frame with an absurd acceleration and interpolate them instead. We keep a track of interpolated frames, which will not be used for depth validation but can be used for depth estimation algorithms that need odometry of previous frames.
For each video :
cp video_workspace/final_model/images.txt video_workspace/final_model/images_raw.txt python filter_colmap_model.py \ --input_images_colmap video_workspace/final_model/images_raw.txt \ --output_images_colmap video_workspace/images_filtered.txt \ --metadata video_folder/metadata.csv \ --interpolated_frames_list video_workspace/interpolated_frames.txt -
Cameras resizing (optional)
In the case you don't need the full size depth maps, you can change the colmap camera file that stores image calibration information.
video_folderandvideo_workspaceare placeholders following the same convention as in step 14.cp video_workspace/final_model/cameras.txt video_workspace/final_model/cameras_raw.txt python resize_colmap_cameras.py \ --input_cameras_colmap video_workspace/final_model/cameras.txt \ --output_cameras_colmap video_workspace/final_model/cameras.txt \ --width 416In this example, each cameras stored in the
cameras.txtfille will be rescaled (and the parameters changed accordingly) so that the width is now 416 pixels, with the same ratio a before. -
Raw Groundtruth generation
video_folderandvideo_workspaceare placeholders following the same convention as in step 14.For each video :
ETH3D/build/GroundTruthCreator \ --scan_alignment_path Workspace/aligned.mlp \ --image_base_path Raw_output_directory/COLMAP_img_root \ --state_path video_workspace/final_model \ --output_folder_path Raw_output_directory \ --occlusion_mesh_path Workspace/Lidar/occlusion_mesh.ply \ --occlusion_splats_path Workspace/Lidar/splats.ply \ --max_occlusion_depth 200 \ --write_point_cloud 0 \ --write_depth_maps 1 \ --write_occlusion_depth 1 \ --compress_depth_maps 1This will create for each video a folder
Raw_output_directory/ground_truth_depth/{video name}with files with depth information. Note that folder structure is not preserved inground_truth_depth.--write_occlusion_depthis used to save occlusion depth maps in the folderRaw_output_directory/occlusion_depth/{video name}/. It will make the folderRaw_output_directorymuch heavier but it is optional. It is used for inspection purpose.--compress_depth_mapsis used to compress depth maps with GZip algorithm. When not using compressiong, the files will be named{frame_name.jpg}(even if it's not a jpeg file), and otherwise it will be named{frame_name.jpg}.gz. Note that for non sparse depth maps (especially occlusion depth maps), the GZ compression is not very effective.Alternatively, you can do a sanity check before creating depth maps by running dataset inspector See https://github.com/ETH3D/dataset-pipeline#dataset-inspection
- Note that you don't need the option
--multi_res_point_cloud_directory_path - Also note that this will load every image of your video, so for long videos it can be very RAM demanding
ETH3D/build/DatasetInspector \ --scan_alignment_path Workspace/aligned.mlp \ --image_base_path Raw_output_directory/COLMAP_img_root \ --state_path video_wotrkspace/final_model \ --occlusion_mesh_path Workspace/Lidar/occlusion_mesh.ply \ --occlusion_splats_path Workspace/Lidar/splats.ply \ --max_occlusion_depth 200 - Note that you don't need the option
-
Dataset conversion
video_folderandvideo_workspaceare placeholders following the same convention as in step 13.For each video :
python convert_dataset.py \ --depth_dir Raw_output_directory/ground_truth_depth/{video name} \ --images_root_folder Raw_output_directory/COLMAP_img_root \ --occ_dir Raw_output_directory/occlusion_depth/{video name} \ --metadata_path video_folder/metadata.csv \ --reg_matrix workspace/matrix_thorough.txt \ --dataset_output_dir Converted_output_directory/dataset/ \ --video_output_dir Converted_output_directory/visualization/ \ --interpolated_frames_list video_workspace/interpolated_frames.txt \ --final_model video_workspace/final_model/ \ --video \ --downscale 4 \ --threads 8This will create a dataset at the folder
Converted_output_directory/dataset/with images, depth maps in npy format, camera intrinsics and distortion in txt and yaml, pose information in the same format as KITTI odometry, and relevant metadata stored in a csv file. See Output directories. The registration matrix is given so that we can scale the poses accordingly : if the registration matrix is not a pure rotation, knowing that the lidar point cloud has the right, it means that the COLMAP needs to be rescaled, and so do the poses. -
Evaluation list creation
Once everything is constructed, you can specify a subset of e.g. 500 frames for evaluaton.
python construct_evaluation_metadata.py \ --dataset_dir Converted_output_directory/dataset/ \ --max_num_samples 500 \ --split 0.9 \ --seed 0 \ --min_shift 50 \ --allow_interpolated_framesthis will try to select at most 500 frames (
--max_num_samples 500) such that 90% (--split 0.9) of folders are kept as training folders, and every frame has at least 50 frames with valid odometry before (--min_shift 50). Interpolated frames are allowed for odometry to be considered valid (but not for depth ground truth) (--allow_interpolated_frames)It will create a txt file with test file paths (
/path/to/dataset/test_files.txt), a txt file with train folders (/path/to/dataset/train_folders.txt) and lastly a txt file with flight path vector coordinates (in pixels) (/path/to/dataset/fpv.txt) -
Training dataset creation
In the case you want to run a auto-supervised training on the frames, you can filter the frames with a dedicated script that will make that the camera is actually moving, and not only rotating.
python split_dataset.py \ --min_displacement 0.1 \ --dataset_dir Converted_output_directory/dataset/ \ --output_dir train_folder \ --scenes_list Converted_output_directory/train_folders.txt \ --max_rotation 1 \ --min_num_frames 5 \ --train_split 0.9This will discard frames with too little displacement and too much rotation, and divide the scene in folders containg consecutive frames that respect the minimum displacement and maximum rotation between frames. The train folder can be directly used for training by e.g. SfmLearner or Unsupervised DepthNet. Notice that there are dedicated branchs to run an inference script that will make use of the evaluation toolkit.
In case you already have constructed a dataset and you still have the workspace that used available, you can easily add new images to the dataset. See https://colmap.github.io/faq.html#register-localize-new-images-into-an-existing-reconstruction
The main task is to localize news images in the thorough model, and use the already computed Lidar cloud alignment to deduce the new depth.
The basic steps are :
- Extract feature of new frames
- Match extracted features with frames of first database (usually named
scan_thorough.db) - Either run
colmap mapperorcolmap image_registratorin order to have a model where the new frames are registered - (Optional) Re-build the Occlusion mesh. This can be important if the new images see parts of the model that were unseen before. Delaunay Meshing will have occluded it, as since it is not seen by any localized image, it was deemed in the interior of the model.
- Run Point cloud densification. If workspace is intact, it should be very fast, as it will only compute depth maps of new images
- Run stereo fusion
- Transfer visibility from dense reconstruction to Lidar point cloud
- Run delauney mesher on Lidar point cloud with new visibility index
- Run splat creator
- Extract desired frames in a new colmap model only containing these frames.
- Run ETH3D's
GroundTruthCreatoron the extracte colmap model - run
convert_dataseton every subfolder of the new frames
All these steps can be done under the script picture_localization.py with the same options as the script main_pipeline.py, except when unneeded. To these options are added 4 more options:
--map_new_images: if selected, will replace the 'omage_registrator' step with a full mapping step--bundle_adjuster_steps: number of iteration for bundle adjustor after image registration (default: 100)--rebuild_occlusion_mesh: If selected, will rebuild a new dense point cloud and delauney mesh. Useful when new images see new parts of the model--generic_model: COLMAP model for image folders. Same zoom level assumed throughout whole folders. See https://colmap.github.io/cameras.html (default: OPENCV)
Once you have you dataset, with your depth maps and a list of frames used for evaluation, you can use a special package to get evaluation metrics of your depth estimation algorithm. See dedicated README
pip install -e evaluation_toolkit
The scene is a Manoir in french country side
- Terrain dimensions : 350m x 100m
- Max altitude : 20m

3D Lidar data was captured by a DJI Matrice 600 with a Velodyne VLP-16 on board, with RTK GPS system.


For photogrammetry oriented pictures, we used an Anafi drone with the Pix4D app that lets us make one grid and two orbits above the field we wanted to scan. We also used a personal DSLR (Sony alpha-6000) for additional photo.



Here is a vizualisation of the resulting point cloud :


We took videos a two different quality settings :
- 4K, 30fps very good quality
- 720p, 120 fps bad quality (but high framerate)
We have 65k frames in total.


Command used (Input, Workspace, Output and exectuables are omitted, --system used is the same as the one used by professional surveyors (epsg:2154))
python main_pipeline.py --total_frames 1000 --SOR 10 5 --max_num_matches 25000 --multiple_models --registration_method interactive --mesh_resolution 0.1 --splat_threshold 0.05 --lowfps 1 --save_space --splats --gt_images --match_method exhaustive -vv --log out.log
The first image shows the video localisation with each other according to anafi metadata. (made with COLMAP gui) The second image shows the frames that have been kept in order to stay at 1000 frames with an optimal spatial sampling.


Thorough photogrammetry was done with 1000 frames. Notice that not all the area was mapped. It is expected to be completed once we take care of each video.


- First image : black and white drone image
- Second image : depth map vizualisation
- Third image : Occlusion depth map

Training and evaluation was done with DepthNet SFMLearner. See inference scripts:
- https://github.com/ClementPinard/SfmLearner-Pytorch/blob/validation_set_constructor/inference.py
- https://github.com/ClementPinard/unsupervised-depthnet/blob/validation_set_construction/inference_RDC.py
SfmLearner-Norm and DepthNet-Norm indicates the metrics were first averaged over estimations for the same ground truth, and then averaged together. That way, the mean is weighted by the inverse of the ground truth depth frequency in the evaluation set.
SfmLearner-LogNorm and DepthNet-LogNorm are the same but with logarithm of groundtruth
| Algorithm | AbsDiff | StdDiff | AbsRel | StdRel | AbsLog | StdLog | a1 | a2 | a3 |
|---|---|---|---|---|---|---|---|---|---|
| SFMLearner | 18.4018 | 24.4582 | 0.5145 | 0.6196 | 1.0049 | 24.4582 | 0.2395 | 0.4113 | 0.5385 |
| SFMLearner-Norm | 22.0789 | 29.5553 | 0.5418 | 0.6632 | 1.0580 | 29.5553 | 0.2234 | 0.3885 | 0.5143 |
| SFMLearner-LogNorm | 9.1998 | 16.8135 | 0.9798 | 1.5133 | 1.0593 | 16.8135 | 0.2099 | 0.3473 | 0.4680 |
| DepthNet | 11.9498 | 19.4010 | 0.3214 | 0.4651 | 0.6217 | 19.4010 | 0.5708 | 0.7050 | 0.7479 |
| DepthNet-Norm | 15.0757 | 24.1440 | 0.3478 | 0.5159 | 0.6708 | 24.1440 | 0.5244 | 0.6732 | 0.7270 |
| DepthNet-LogNorm | 5.9904 | 13.5207 | 0.6038 | 1.1525 | 0.5642 | 13.5207 | 0.4629 | 0.6221 | 0.7154 |






- See
bundle_adjusment.py: add chamfer loss to regular bundle adjustment, so that the reconstruction not only minimizes pixel reprojection but also distance to Lidar Point Cloud
- for now we can only interpolate everything or nothing, add a threshold time above which we don't consider the pose interpolation reliable anymore, even for odometry
- (not sure if useful) add camera parmeters filtering and interpolation, could be used when smooth zoom is applied
- Apply rectification on the whole dataset to only have pinhole cameras in the end
- Resize and warp all frames to have the exact same width, height, and intrinsics for particular algorithm that are trained on a specific set of intrinsics (see DepthNet)