Character is still moving even after stop swinging controllers #74
Comments
|
Looks like when you are recording the data model, you stop swinging your arms between transitions. Even between steps during recording you should just continue to walk in place (or swing arms etc.) to constantly record valid movements. There should be no still breaks in the model. Also you may need to change the settings in the .ini file for the trackers (or in your case controllers) |
|
Thanks to comment. I have solved my problem.
Now, it gets better motion than previous setting |

{kind=link}
Hi,
I'm using OVR-WIP with Odyssey+ with swinging two controllers.
My problem is the character is still moving even after stopping swinging controllers and it looks like that the character slides. Please, see the following captured image:
I've installed OVR-WIP v4.32, released 27 Jul.
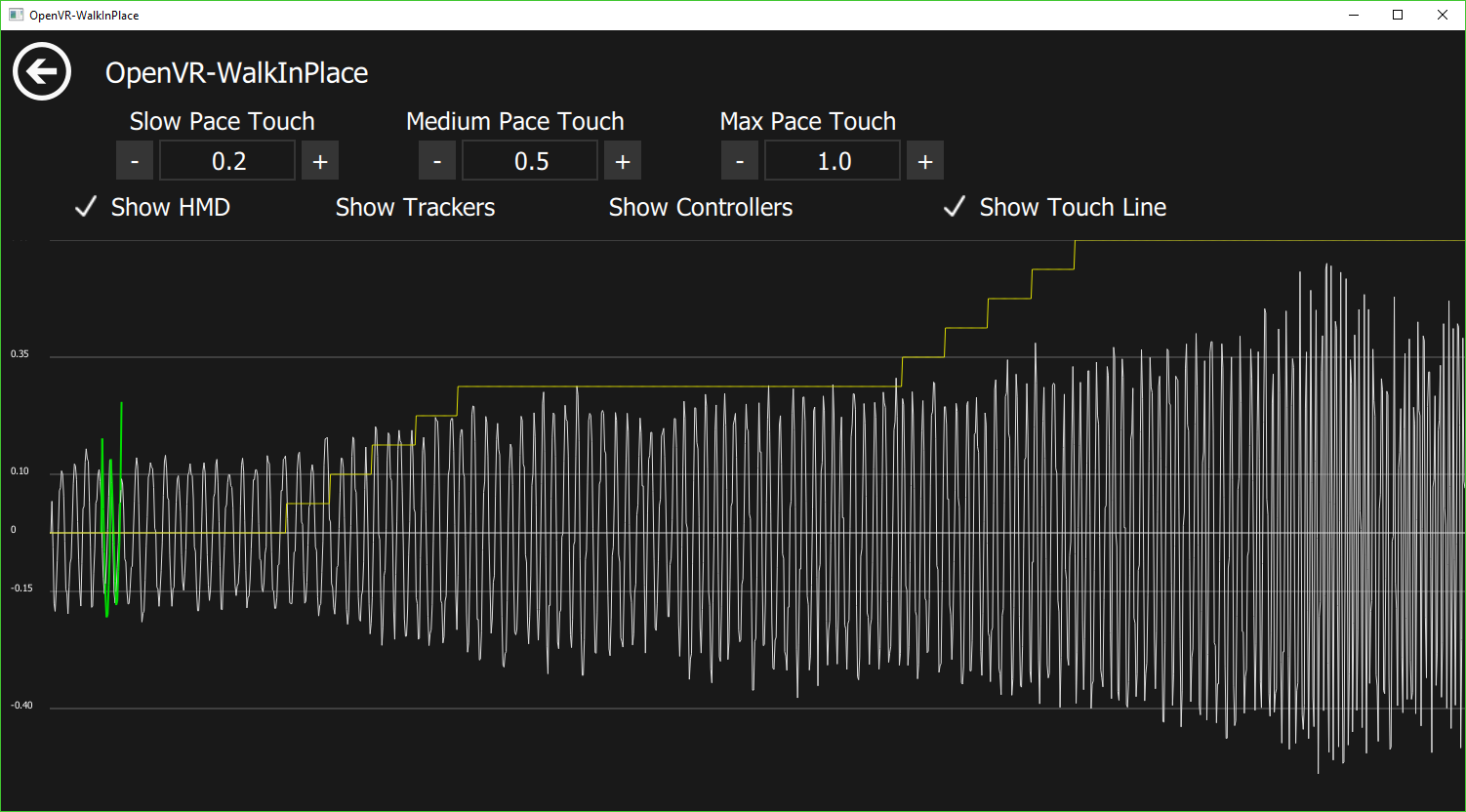
Also, my OVR-WIP is set as:
Other setting are looked as the followings:
How can I fix that? Thanks in advance and the cool project!
The text was updated successfully, but these errors were encountered: