EstimateNormals not working for flat patches #880
Comments
|
Good catch. Looks like a numerical issue of this function: I will dig into it when I got time. |
|
Fun fact: adding minimal noise to the points fixes the problem. |
|
Fixed in #1011 |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
It appears the
EstimateNormalsfunction does not work properly for completely flat patches, also somehow depending on the orientation.To reproduce:
If you write
instead - it works as expected; if you use 0 and 1 or 0 and 2 as indices - it no longer works.
Expected:
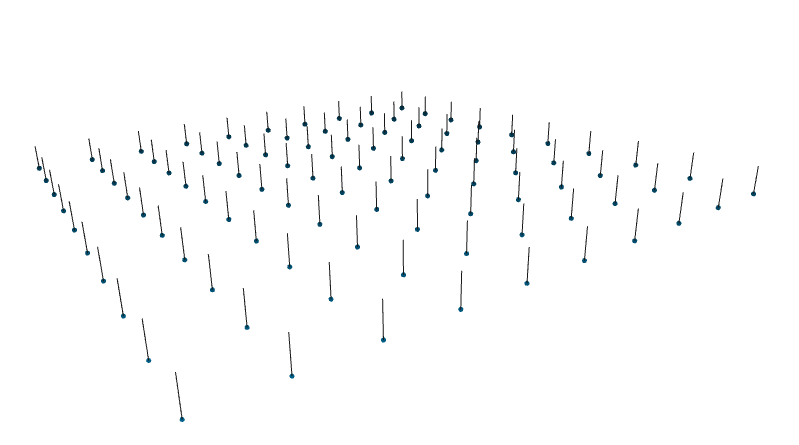
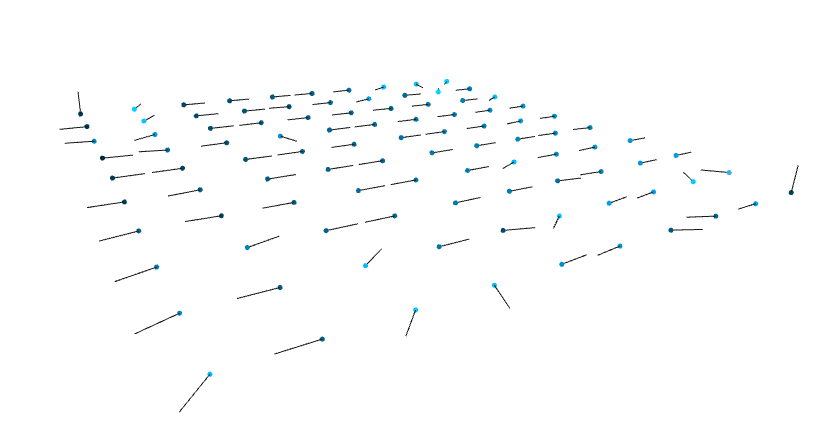
Got:
Environment (please complete the following information):
The text was updated successfully, but these errors were encountered: