Issue *CONSTRAINED_JOINT_STIFFNESS in combination with other keywords #1344
Assignees

Labels
bug
Something isn't working
Comments
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Describe the bug
Models with *CONSTRAINED_JOINT_STIFFNESS in combination with other keywords don't work as expected or giving starter errors.
coord-dir(X / Y): coordinate system direction in the joint direction or not.
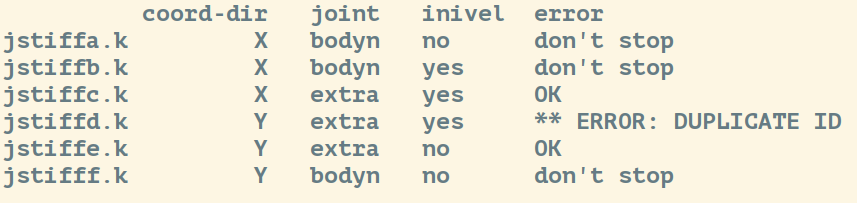
joint(body / extra): joint nodes from rigid bodies or on extra_nodes.
inivel(no, yes): another (shell)part has an initial velocity.
To Reproduce
Run the models and watch the rotation.
Expected behavior
Independent if there is an initial velocity in the model or the joint is defined by the nodes of the rigid bodies, the model should run and respect the stopping angles.
Output
The models are in the attached archive
jstiff_issue.tar.gz.
Desktop (please complete the following information):
Additional context
In LS-DYNA *CONSTRAINED_JOINT and *CONSTRAINED_JOINT_STIFFNESS are independent features, which "can" be, but must not beconnected.
The text was updated successfully, but these errors were encountered: