Based on the wikipedia example
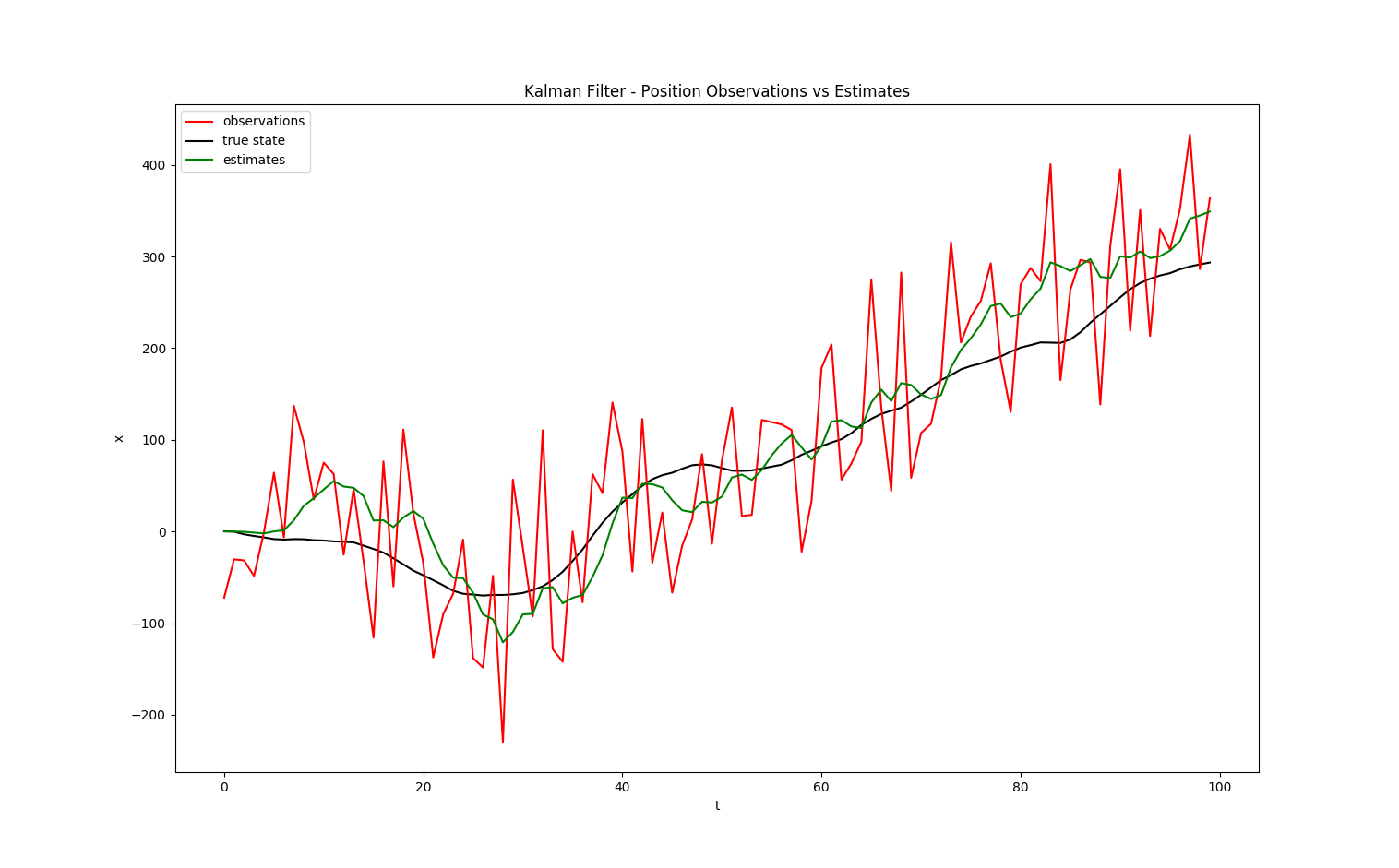
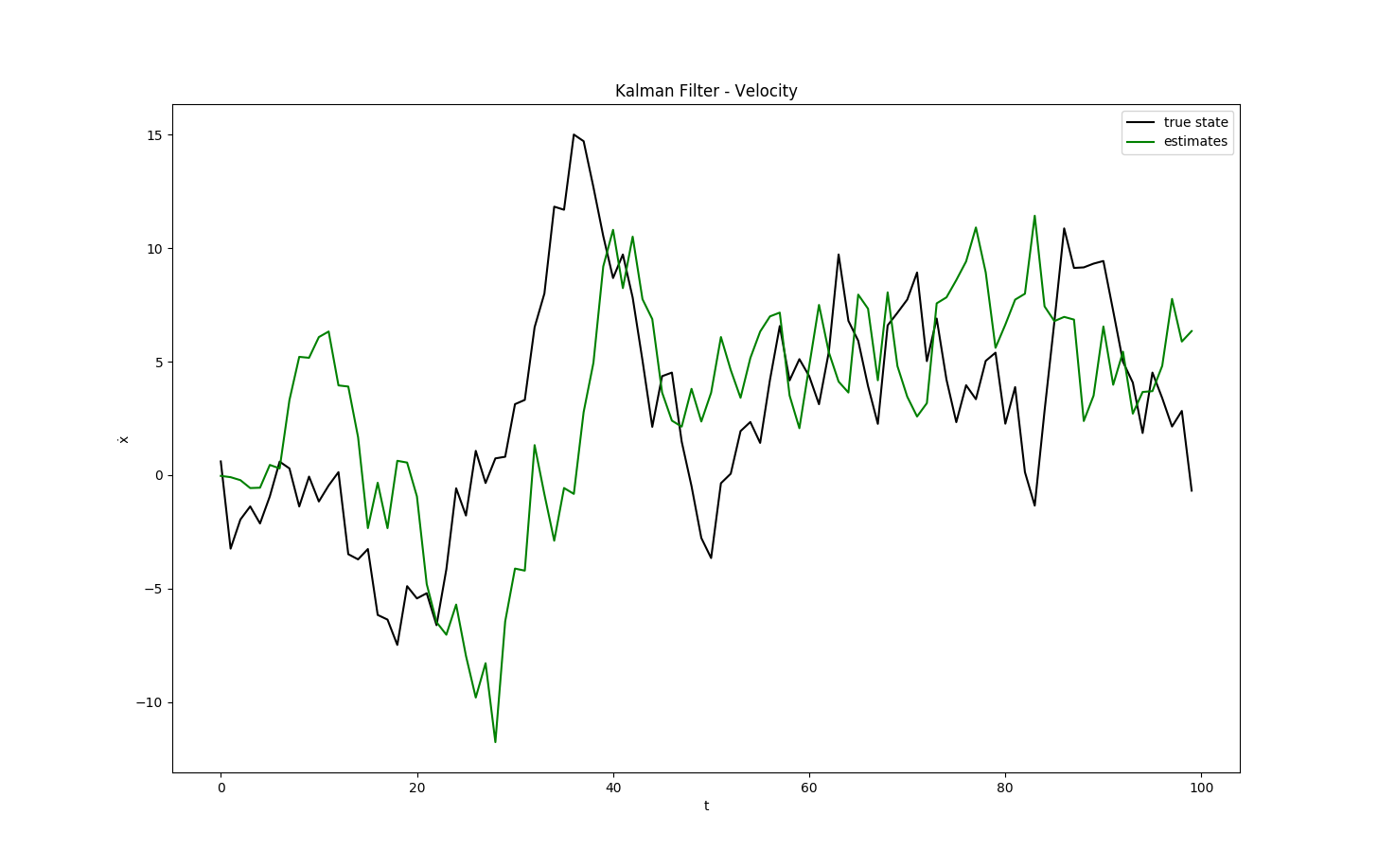
Consider a truck on frictionless, straight rails. Initially, the truck is stationary at position 0, but it is buffeted this way and that by random uncontrolled forces. We measure the position of the truck every Δt seconds, but these measurements are imprecise; we want to maintain a model of where the truck is and what is its velocity.